
BryleeDrive® HighVac 40mm – Type 1
The BryleeDrive® HighVac 40mm – type 1 micro positioning system, which is designed for use in high-vacuum environments and lubricated with Fomblin, combines four movement axes in the smallest of spaces.
All four axes of the micro positioning system are driven by stepper motors with 200 steps per rotation and can thereby easily be operated in an open loop control.
The rotative axes are also equipped with application-specific adapters by means of which the system can be integrated in the application without additional effort.
At the heart of this multi-axis microsystem are zero-backlash MaalonDrive® gears with a reduction ratio of 160:1.

Benefits
1) Vacuum suitable lubrication
2) Robust control without feedback system
3) Custom designed output shaft
4) Custom designed tool holder
5) Zero backlash with optimised fit between speed and resolution
Technical parameters
The values shown are based on calculations and measurement procedures carried out by Micromotion GmbH, which are carried out according to the current state of the art. Our definitions can be found at www.micromotion-drives.com. For further information please contact sales@micromotion.de.
Global system
Nr.
Parameter
Symbol
Value
Properties
P-001
x
P-001:HV (high vacuum) corresponds to a pressure range from 10E-3 to 10E-7mbar. UHV (ultra-high vacuum) corresponds to a pressure range from 10E-7 to 10E-12mbar. The vacuum-compatibility is influenced by the used materials as well as the lubricant. In addition, the design must not have any cavities or inclusions. The achievable vacuum quality is likewise dependent on the design of the used motor.
Vacuum suitable
HV
P-034
x
P-034:The service life is defined by means of the rated operating point, i.e., rated speed and rated torque, as well as a change of the accuracy characteristics, i.e., unidirectional repeatability, transmission accuracy, lost motion, of less than 10% of the respective catalogue value.
Lifetime for rated operation
500 h
P-056
x
P-056:The weight of the drive without cables and plugs.
Weight
m
70 g
P-057
x
P-057:Minimum permissible temperature at which the drive may be stored or decommissioned without being impaired or destroyed as a result.
Min. permissible ambient temperature (non-operating)
T
0 °C
P-058
x
P-058:Minimum permissible temperature at which the drive can be operated.
Min. permissible ambient temperature (operating)
T
0 °C
P-059
x
P-059:Maximum permissible temperature at which the drive may be stored or decommissioned without being impaired or destroyed as a result.
Max. permissible ambient temperature (non-operating)
T
80 °C
P-060
x
P-060:Maximum permissible temperature at which the drive can still be operated.
Max. permissible ambient temperature (operating)
T
60 °C
P-099
x
P-099:
Additional technical data
Bar magnets have to be provided. Tilting at point (A) approx. 10 µm/N
Data limit switch
P-300
x
P-300:
Type of limit switch
4x mechanical reference switches with conection for wire diameter 1.3 mm (cables not included)
P-302
x
P-302:
Configuration Limit switches
n.o.
Axis 1: rotational axis with magnet adapter
Nr.
Parameter
Symbol
Value
Data limit switch
P-003
x
P-003:The reduction ratio describes the relationship between the input movement and the output movement. With a reduction ratio, the output movement is smaller than the input movement.
Ratio
i
160 : 1
P-004
x
P-004:With self-locking, the forces caused by friction are always greater than the applied adjustment forces due to the geometric relationships of the sliding partners. Due to the geometric conditions, the sliding partner in which the force is initiated cannot be moved relative to the sliding parter on which the adjustment force is applied.
Self-locking
ja
P-008
x
P-008:The unidirectional repeatability describes the positional uncertainty that arises when repeatedly approaching a setpoint from the same direction with no load.
The repeatability is defined as half of the maximum difference together with a +/- sign.
Repeatability unidirectional
12.025 arcsec
P-009
x
P-009:The bidirectional repeatability describes the positional uncertainty that arises when repeatedly approaching a setpoint from the opposite direction with no load.
The repeatability is defined as half of the maximum difference together with a +/- sign.
Repeatability bidirectional
20.0675 arcmin
P-010
x
P-010:The positioning accuracy of a gear describes the maximum deviation of the output angle relative to the setpoint or, with a linear actuator, the maximum deviation of the output position relative to the setpoint.
The measurement is performed during a complete rotation of the output element or a complete traverse of the travel range path with the aid of a high-resolution measurement system.
There is no change in the direction of rotation or direction reversal.
The positioning accuracy is defined as the absolute value of the maximum difference between the theoretical setpoint position and the measured actual position of the output element.
Accuracy
15.135 arcmin
P-011
x
P-011:The transmission accuracy of a gear describes the linearity error between input and output angle.
The measurement is performed during a complete rotation of the output element with the aid of a high-resolution measurement system.
There is no change in the direction of rotation.
The transmission accuracy is defined as the sum of the absolute values of the maximum positive and negative deviation between the theoretical and the measured angular position of the output shaft.
Transmission accuracy
30.27 arcmin
P-012
x
P-012:The positioning resolution refers to the smallest angular change or positional change that can be distinguished by the positioning system.
With eccentric systems, the characteristic of the linearly resulting positioning resolution is described as a function of the angular position and thereby indicates the smallest positional change as a function of the angular position that can be distinguished by the positioning system.
With eccentric systems, it is defined such that at an angular position of 0 degrees, the eccentric is perpendicular to the resulting movement direction.
Resolution
0.01125 °
P-013
x
P-013:The torsional stiffness can be ascertained from the characteristic of the hysteresis curve of a gear.
The torsional stiffness is defined as the slope of the hysteresis line and describes the elastic torsional angle of the output shaft as a function of a torque.
The hysteresis curve is determined by subjecting the output to load while the input is blocked with a clockwise and an anticlockwise torque and the corresponding angular displacement measured.
Torsional stiffness
9.30 Nm/rad
P-014
x
P-014:The value for the lost motion can be ascertained from the characteristic of the hysteresis curve of a gear or linear actuator.
Lost motion is defined as the angular difference or position difference at which the two branches of the hysteresis curve cross the torque or force zero point, i.e., no load is applied.
The hysteresis curve is determined by subjecting the output to load while the input is blocked with a clockwise and an anticlockwise torque or a forward-acting and a backward-acting force and the corresponding angular displacement or positional change measured.
Lost motion
20 arcmin
P-015
x
P-015:The backlash can be determined from the course of the hysteresis curve of a gear or mechanical transmission system. The backlash is defined as the range in which the course of the hysteresis curve is vertical, i.e. there is a change in angle or position without changing the torque or force. The hysteresis curve is determined by loading the output with a clockwise and counterclockwise torque or force when the drive is blocked and measuring the associated angular torsion.
Backlash
0 arcmin
P-016
x
P-016:Rated torque or rated force is defined as the torque or force at which the service life is achieved under rated conditions, i.e., rated speed.
With drive systems, the motor torque may, in some cases, not be adequate for overcoming the running torque of the complete system under rated conditions.
Rated torque
T
12 mNm
P-017
x
P-017:The peak torque or peak force is the loading of the components in the drive train, e.g., the teeth of the gears, still below the fatigue strength.
This does, however, result in increased tooth wear, which leads to a reduction in the service life.
With drive systems, the motor torque may, in some cases, not be adequate for overcoming the running torque of the complete system at peak torque or peak force.
Peak torque
T
24 mNm
P-018
x
P-018:The momentary peak torque or momentary peak force describes the maximum permissible torque or force that can act on the actuator. If the momentary peak torque or momentary peak force is exceeded, damage or a reduced life time of the actuator cannot be ruled out. With momentary peak torque or momentary peak force, the elastic deformations of the teeth are still small enough that no tooth meshing problems occur and proper function is ensured. The loads do, however, exceed the limit of the fatigue strength. Thus, the number of loads should be minimised. Should it occur once, breakage or failure will not result. With drive systems, the motor torque may, in some cases, not be adequate for overcoming the running torque of the complete system at momentary peak torque or momentary peak force. In drive systems, the motor torque may not be sufficient to generate enough torque to meet the permissible momentary peak torque or momentary peak force. On the other hand, in drive systems, the existing motor torque can be so high that the drive system can exceed the permissible momentary peak torque or momentary peak force and the drive system can be damaged.
Momentary peak torque
T
55 mNm
P-021
x
P-021:Rated input speed is defined as the speed at which the service life is achieved under rated conditions, i.e., rated torque.
With drive systems, the motor torque may, in some cases, not be adequate for overcoming the running torque of the complete system at rated speed.
Rated input speed
n
100 rpm
P-022
x
P-022:The maximum input speed refers to the speed before which mechanical damages occur to components in the drive train, e.g., scoring of the teeth or damage to the ball bearings.
With drive systems, the motor torque may, in some cases, not be adequate for overcoming the running torque of the complete system at maximum speed.
Maximum input speed
n
100 rpm
P-023
x
P-023:Rated output speed or rated speed is defined as the speed at which the service life is achieved under rated conditions, i.e., rated torque or rated force.
With drive systems, the motor torque may, in some cases, not be adequate for overcoming the running torque of the complete system at rated speed.
Rated output speed
n
0.625 rpm
P-024
x
P-024:The maximum output speed or maximum speed refers to the speed before which mechanical damages occur to components in the drive train, e.g., scoring of the teeth.
With drive systems, the motor torque may, in some cases, not be adequate for overcoming the running torque of the complete system at maximum speed.
Maximum output speed
n
0.625 rpm
P-026
x
P-026:The no-load starting torque describes the torque necessary for putting the gear into rotary motion without additional output-side load at 20°C and standard lubricant.
No-load starting torque
T
75 μNm
P-027
x
P-027:The running torque describes the torque necessary for driving the gear without additional output-side load at 20°C and standard lubricant at constant speed.
No-load running torque
T
50 μNm
P-028
x
P-028:The rated running torque describes the input-side torque that is required to operate the gear in rated operation, i.e., at rated torque and rated speed.
Rated running torque
T
670 μNm
P-035
x
P-035:The backlash can be determined from the course of the hysteresis curve of a gear or mechanical transmission system. The backlash is defined as the range in which the course of the hysteresis curve is vertical, i.e. there is a change in angle or position without changing the torque or force. The hysteresis curve is determined by loading the output with a clockwise and counterclockwise torque or force when the drive is blocked and measuring the associated angular torsion.
Radial backlash output shaft
0 μm
P-036
x
P-036:The backlash can be determined from the course of the hysteresis curve of a gear or mechanical transmission system. The backlash is defined as the range in which the course of the hysteresis curve is vertical, i.e. there is a change in angle or position without changing the torque or force. The hysteresis curve is determined by loading the output with a clockwise and counterclockwise torque or force when the drive is blocked and measuring the associated angular torsion.
Axial backlash output shaft
0 μm
P-037
x
P-037:Stiffness of the bearing in the radial direction, i.e., elastic deflection of the mounted shaft in the radial direction as a function of the applied force.
Radial stiffness
c
2.31 N/μm
P-038
x
P-038:Stiffness of the bearing in the axial direction, i.e., elastic deflection of the mounted shaft in the axial direction as a function of the applied force.
Axial stiffness
c
40 N/μm
P-039
x
P-039:Max. permissible radial load on the output shaft (not in operation, force applied constantly)
Describes the maximum permissible radial load on the output shaft, whereby the drive is not in operation, i.e., is at a standstill and the force is applied statically. The static load-bearing capacity of the ball bearings Co and the geometric relationships from the point of force application and the bearing distance are decisive for the determination. For the permissible force, the worst case is assumed as the point of force application, i.e., the maximum distance between the ball bearings and the end of the output shaft.
Max. radial load on output shaft (non-operating, constant load)
F
55 N
P-040
x
P-040:Max. permissible radial load on the output shaft (not in operation, force applied impulsively)
Describes the maximum permissible radial load on the output shaft, whereby the drive is not in operation, i.e., is at a standstill and the force is applied impulsively. The load-bearing capacity of the ball bearings is decisive for the determination. With impulsive loading, the permissible load-bearing capacity of the bearings is reduced to one third of Co.
Max. radial load on output shaft (non-operating, impulsive load)
F
20 N
P-041
x
P-041:Max. permissible radial load on the output shaft (in operation, force applied constantly)
Describes the maximum permissible radial load on the output shaft, whereby the drive is in operation and the force is applied statically. Particularly important for the determination of the permissible force in the dynamic case are, in addition to the load-bearing capacity of the ball bearings, the stiffness of the bearing and the run-out error on the dynamic spline caused by elastic deformation. For the permissible force, the worst case is assumed as the point of force application, i.e., the maximum distance between the ball bearings and the end of the output shaft.
Max. radial load on output shaft (operating, constant load)
F
7 N
P-042
x
P-042:Max. permissible radial load on the output shaft (in operation, force applied impulsively)
Describes the maximum permissible radial load on the output shaft, whereby the drive is in operation, i.e., is turning, and the force is applied impulsively. With impulsive loading, the permissible dynamic load-bearing capacity of the ball bearings is reduced to one third of Cr. Likewise decisive for the determination are, in addition to the load-bearing capacity of the ball bearings, the elastic deformation of the output shaft near the dynamic spline and the associated run-out error due to the stiffness of the bearing.
Max. radial load on output shaft (operating, impulsive load)
F
7 N
P-043
x
P-043:Max. permissible axial load on the output shaft (not in operation, force applied constantly)
Describes the maximum permissible axial load on the output shaft, whereby the drive is not in operation, i.e., is at a standstill and the force is applied statically. Decisive for the determination is the static load bearing capacity of the ball bearings as well as the elastic deformation of the output shaft due to the stiffness of the output bearing and the associated position of the dynamic spline.
Max. axial load on output shaft (non-operating, constant
F
150 N
P-044
x
P-044:Max. permissible axial load on the output shaft (not in operation, force applied impulsively)
Describes the maximum permissible axial load on the output shaft, whereby the drive is not in operation, i.e., is at a standstill and the force is applied impulsively. Decisive for the determination is the static load bearing capacity of the ball bearings, which, in the impulsive case, corresponds to just one third of Co, as well as the elastic deformation of the output shaft due to the stiffness of the output bearing and the associated position of the dynamic spline.
Max. axial load on output shaft (non-operating, impulsive load)
F
50 N
P-045
x
P-045:Max. permissible axial load on the output shaft (in operation, force applied constantly)
Describes the maximum permissible axial load on the output shaft, whereby the drive is in operation, i.e., is turning, and the force is applied statically. Decisive for the determination is the dynamic load bearing capacity of the ball bearings as well as the elastic deformation of the output shaft due to the stiffness of the output bearing and the associated position of the dynamic spline.
Max. axial load on output shaft (operating, constant load)
F
380 N
P-046
x
P-046:Max. permissible axial load on the output shaft (in operation, force applied impulsively)
Describes the maximum permissible axial load on the output shaft, whereby the drive is in operation, i.e., is turning, and the force is applied impulsively. Decisive for the determination is the dynamic load bearing capacity of the ball bearings, which, in the impulsive case, corresponds to just one third of Cr, as well as the elastic deformation of the output shaft due to the stiffness of the output bearing and the associated change in position of the dynamic spline.
Max. axial load on output shaft (operating, impulsive load)
F
127 N
P-055
x
P-055:The moment of inertia specifies a body’s resistance to change its rotational movement.
Moment of inertia
I
900023 * 10-4 gcm2
Motor data: Stepper VSS 19.200.0,3-UHV-4LP-2g5 dry lubrication
P-100
x
P-100:
Motortype
Stepper
P-102
x
P-102:The maximum speed of the motor describes the speed before mechanical damages occur to the commutator, the rotor or the bearing.
Maximum speed of motor
n
100 rpm
P-105
x
P-105:Describes the torque developed by the motor while at a standstill.
Holding torque of motor (unpowered)
T
0.9 mNm
P-109
x
P-109:The phase current that may flow through both phase coils without the motor overheating while at an ambient temperature of 20°C and constant operation.
Rated current of motor
I
300 mA
P-111
x
P-111:The rated voltage corresponds to the voltage at which all other rated characteristic values of the motor, particularly the rated current at 20°C, are set, measured and classified.
Rated voltage of motor
U
42 V
P-112
x
P-112:The phase resistance describes the ohmic resistance of the coil of a phase at an ambient temperature of 20°C in the steady state.
Phase resistance of motor
R
6 ohm
P-113
x
P-113:Describes the inductance of the coil of a phase at an ambient temperature measured at 1 kHz.
Inductance of motor
L
2.2 mH
P-115
x
P-115:The full step angle of the motor describes the angle at which the rotor turns if a phase is advanced.
Full step angle of motor
1.8 °
P-116
x
P-116:The angular accuracy of step describes the deviation of the current rotor position from the ideal target rotor position, whereby no external load is applied.
Angular accuracy of step of motor
±0.09 °
P-117
x
P-117:The electrical time constant describes the time required to achieve 67% of the possible phase current of a specified operating point.
Electrical time constant of motor
t
0.367 ms
P-118
x
P-118:The maximum temperature that may occur in the coil without destroying the magnets or the coil.
The coil temperature can be calculated by measuring the change in resistance and the temperature coefficient alpha, which is dependent on the coil wire material. T1 = 1/alpha * (R1/R0 + alpha*T0 – 1)
Max. coil temperature of motor
T
300 °C
Material information
P-900
x
P-900:At Micromotion GmbH, hazardous materials, which are referred to in EU directive 2011/65/EU, are purchased/used only in compliance with this directive.
RoHS compliant
ja
P-901
x
P-901:
Lubrication of output bearing gearbox
MoS2 (dry lubrication)
P-903
x
P-903:
Lubrication of gear component set
Molykote BR 2 plus
P-904
x
P-904:
Lubrication of bearing motor
dry coated
P-908
x
P-908:
Material of gear component set
NiFe
P-909
x
P-909:
Material of output bearing gearbox
1.4108 DIN EN
P-911
x
P-911:
Material of bearing motor
Stainless steel
P-912
x
P-912:
Material of gearbox output side
1.4305 DIN EN
P-914
x
P-914:
Material of motor housing
Stainless steel
Axis 2: rotational axis with magnet adapter
Nr.
Parameter
Symbol
Value
Material information
P-003
x
P-003:The reduction ratio describes the relationship between the input movement and the output movement. With a reduction ratio, the output movement is smaller than the input movement.
Ratio
i
160 : 1
P-004
x
P-004:With self-locking, the forces caused by friction are always greater than the applied adjustment forces due to the geometric relationships of the sliding partners. Due to the geometric conditions, the sliding partner in which the force is initiated cannot be moved relative to the sliding parter on which the adjustment force is applied.
Self-locking
ja
P-008
x
P-008:The unidirectional repeatability describes the positional uncertainty that arises when repeatedly approaching a setpoint from the same direction with no load.
The repeatability is defined as half of the maximum difference together with a +/- sign.
Repeatability unidirectional
12.025 arcsec
P-009
x
P-009:The bidirectional repeatability describes the positional uncertainty that arises when repeatedly approaching a setpoint from the opposite direction with no load.
The repeatability is defined as half of the maximum difference together with a +/- sign.
Repeatability bidirectional
20.0675 arcmin
P-010
x
P-010:The positioning accuracy of a gear describes the maximum deviation of the output angle relative to the setpoint or, with a linear actuator, the maximum deviation of the output position relative to the setpoint.
The measurement is performed during a complete rotation of the output element or a complete traverse of the travel range path with the aid of a high-resolution measurement system.
There is no change in the direction of rotation or direction reversal.
The positioning accuracy is defined as the absolute value of the maximum difference between the theoretical setpoint position and the measured actual position of the output element.
Accuracy
15.135 arcmin
P-011
x
P-011:The transmission accuracy of a gear describes the linearity error between input and output angle.
The measurement is performed during a complete rotation of the output element with the aid of a high-resolution measurement system.
There is no change in the direction of rotation.
The transmission accuracy is defined as the sum of the absolute values of the maximum positive and negative deviation between the theoretical and the measured angular position of the output shaft.
Transmission accuracy
30.27 arcmin
P-012
x
P-012:The positioning resolution refers to the smallest angular change or positional change that can be distinguished by the positioning system.
With eccentric systems, the characteristic of the linearly resulting positioning resolution is described as a function of the angular position and thereby indicates the smallest positional change as a function of the angular position that can be distinguished by the positioning system.
With eccentric systems, it is defined such that at an angular position of 0 degrees, the eccentric is perpendicular to the resulting movement direction.
Resolution
0.01125 °
P-013
x
P-013:The torsional stiffness can be ascertained from the characteristic of the hysteresis curve of a gear.
The torsional stiffness is defined as the slope of the hysteresis line and describes the elastic torsional angle of the output shaft as a function of a torque.
The hysteresis curve is determined by subjecting the output to load while the input is blocked with a clockwise and an anticlockwise torque and the corresponding angular displacement measured.
Torsional stiffness
9.30 Nm/rad
P-014
x
P-014:The value for the lost motion can be ascertained from the characteristic of the hysteresis curve of a gear or linear actuator.
Lost motion is defined as the angular difference or position difference at which the two branches of the hysteresis curve cross the torque or force zero point, i.e., no load is applied.
The hysteresis curve is determined by subjecting the output to load while the input is blocked with a clockwise and an anticlockwise torque or a forward-acting and a backward-acting force and the corresponding angular displacement or positional change measured.
Lost motion
20 arcmin
P-015
x
P-015:The backlash can be determined from the course of the hysteresis curve of a gear or mechanical transmission system. The backlash is defined as the range in which the course of the hysteresis curve is vertical, i.e. there is a change in angle or position without changing the torque or force. The hysteresis curve is determined by loading the output with a clockwise and counterclockwise torque or force when the drive is blocked and measuring the associated angular torsion.
Backlash
0 arcmin
P-016
x
P-016:Rated torque or rated force is defined as the torque or force at which the service life is achieved under rated conditions, i.e., rated speed.
With drive systems, the motor torque may, in some cases, not be adequate for overcoming the running torque of the complete system under rated conditions.
Rated torque
T
12 mNm
P-017
x
P-017:The peak torque or peak force is the loading of the components in the drive train, e.g., the teeth of the gears, still below the fatigue strength.
This does, however, result in increased tooth wear, which leads to a reduction in the service life.
With drive systems, the motor torque may, in some cases, not be adequate for overcoming the running torque of the complete system at peak torque or peak force.
Peak torque
T
24 mNm
P-018
x
P-018:The momentary peak torque or momentary peak force describes the maximum permissible torque or force that can act on the actuator. If the momentary peak torque or momentary peak force is exceeded, damage or a reduced life time of the actuator cannot be ruled out. With momentary peak torque or momentary peak force, the elastic deformations of the teeth are still small enough that no tooth meshing problems occur and proper function is ensured. The loads do, however, exceed the limit of the fatigue strength. Thus, the number of loads should be minimised. Should it occur once, breakage or failure will not result. With drive systems, the motor torque may, in some cases, not be adequate for overcoming the running torque of the complete system at momentary peak torque or momentary peak force. In drive systems, the motor torque may not be sufficient to generate enough torque to meet the permissible momentary peak torque or momentary peak force. On the other hand, in drive systems, the existing motor torque can be so high that the drive system can exceed the permissible momentary peak torque or momentary peak force and the drive system can be damaged.
Momentary peak torque
T
55 mNm
P-021
x
P-021:Rated input speed is defined as the speed at which the service life is achieved under rated conditions, i.e., rated torque.
With drive systems, the motor torque may, in some cases, not be adequate for overcoming the running torque of the complete system at rated speed.
Rated input speed
n
100 rpm
P-022
x
P-022:The maximum input speed refers to the speed before which mechanical damages occur to components in the drive train, e.g., scoring of the teeth or damage to the ball bearings.
With drive systems, the motor torque may, in some cases, not be adequate for overcoming the running torque of the complete system at maximum speed.
Maximum input speed
n
100 rpm
P-023
x
P-023:Rated output speed or rated speed is defined as the speed at which the service life is achieved under rated conditions, i.e., rated torque or rated force.
With drive systems, the motor torque may, in some cases, not be adequate for overcoming the running torque of the complete system at rated speed.
Rated output speed
n
0.625 rpm
P-024
x
P-024:The maximum output speed or maximum speed refers to the speed before which mechanical damages occur to components in the drive train, e.g., scoring of the teeth.
With drive systems, the motor torque may, in some cases, not be adequate for overcoming the running torque of the complete system at maximum speed.
Maximum output speed
n
0.625 rpm
P-026
x
P-026:The no-load starting torque describes the torque necessary for putting the gear into rotary motion without additional output-side load at 20°C and standard lubricant.
No-load starting torque
T
75 μNm
P-027
x
P-027:The running torque describes the torque necessary for driving the gear without additional output-side load at 20°C and standard lubricant at constant speed.
No-load running torque
T
50 μNm
P-028
x
P-028:The rated running torque describes the input-side torque that is required to operate the gear in rated operation, i.e., at rated torque and rated speed.
Rated running torque
T
670 μNm
P-035
x
P-035:The backlash can be determined from the course of the hysteresis curve of a gear or mechanical transmission system. The backlash is defined as the range in which the course of the hysteresis curve is vertical, i.e. there is a change in angle or position without changing the torque or force. The hysteresis curve is determined by loading the output with a clockwise and counterclockwise torque or force when the drive is blocked and measuring the associated angular torsion.
Radial backlash output shaft
0 μm
P-036
x
P-036:The backlash can be determined from the course of the hysteresis curve of a gear or mechanical transmission system. The backlash is defined as the range in which the course of the hysteresis curve is vertical, i.e. there is a change in angle or position without changing the torque or force. The hysteresis curve is determined by loading the output with a clockwise and counterclockwise torque or force when the drive is blocked and measuring the associated angular torsion.
Axial backlash output shaft
0 μm
P-037
x
P-037:Stiffness of the bearing in the radial direction, i.e., elastic deflection of the mounted shaft in the radial direction as a function of the applied force.
Radial stiffness
c
2.31 N/μm
P-038
x
P-038:Stiffness of the bearing in the axial direction, i.e., elastic deflection of the mounted shaft in the axial direction as a function of the applied force.
Axial stiffness
c
40 N/μm
P-039
x
P-039:Max. permissible radial load on the output shaft (not in operation, force applied constantly)
Describes the maximum permissible radial load on the output shaft, whereby the drive is not in operation, i.e., is at a standstill and the force is applied statically. The static load-bearing capacity of the ball bearings Co and the geometric relationships from the point of force application and the bearing distance are decisive for the determination. For the permissible force, the worst case is assumed as the point of force application, i.e., the maximum distance between the ball bearings and the end of the output shaft.
Max. radial load on output shaft (non-operating, constant load)
F
55 N
P-040
x
P-040:Max. permissible radial load on the output shaft (not in operation, force applied impulsively)
Describes the maximum permissible radial load on the output shaft, whereby the drive is not in operation, i.e., is at a standstill and the force is applied impulsively. The load-bearing capacity of the ball bearings is decisive for the determination. With impulsive loading, the permissible load-bearing capacity of the bearings is reduced to one third of Co.
Max. radial load on output shaft (non-operating, impulsive load)
F
20 N
P-041
x
P-041:Max. permissible radial load on the output shaft (in operation, force applied constantly)
Describes the maximum permissible radial load on the output shaft, whereby the drive is in operation and the force is applied statically. Particularly important for the determination of the permissible force in the dynamic case are, in addition to the load-bearing capacity of the ball bearings, the stiffness of the bearing and the run-out error on the dynamic spline caused by elastic deformation. For the permissible force, the worst case is assumed as the point of force application, i.e., the maximum distance between the ball bearings and the end of the output shaft.
Max. radial load on output shaft (operating, constant load)
F
7 N
P-042
x
P-042:Max. permissible radial load on the output shaft (in operation, force applied impulsively)
Describes the maximum permissible radial load on the output shaft, whereby the drive is in operation, i.e., is turning, and the force is applied impulsively. With impulsive loading, the permissible dynamic load-bearing capacity of the ball bearings is reduced to one third of Cr. Likewise decisive for the determination are, in addition to the load-bearing capacity of the ball bearings, the elastic deformation of the output shaft near the dynamic spline and the associated run-out error due to the stiffness of the bearing.
Max. radial load on output shaft (operating, impulsive load)
F
7 N
P-043
x
P-043:Max. permissible axial load on the output shaft (not in operation, force applied constantly)
Describes the maximum permissible axial load on the output shaft, whereby the drive is not in operation, i.e., is at a standstill and the force is applied statically. Decisive for the determination is the static load bearing capacity of the ball bearings as well as the elastic deformation of the output shaft due to the stiffness of the output bearing and the associated position of the dynamic spline.
Max. axial load on output shaft (non-operating, constant
F
150 N
P-044
x
P-044:Max. permissible axial load on the output shaft (not in operation, force applied impulsively)
Describes the maximum permissible axial load on the output shaft, whereby the drive is not in operation, i.e., is at a standstill and the force is applied impulsively. Decisive for the determination is the static load bearing capacity of the ball bearings, which, in the impulsive case, corresponds to just one third of Co, as well as the elastic deformation of the output shaft due to the stiffness of the output bearing and the associated position of the dynamic spline.
Max. axial load on output shaft (non-operating, impulsive load)
F
50 N
P-045
x
P-045:Max. permissible axial load on the output shaft (in operation, force applied constantly)
Describes the maximum permissible axial load on the output shaft, whereby the drive is in operation, i.e., is turning, and the force is applied statically. Decisive for the determination is the dynamic load bearing capacity of the ball bearings as well as the elastic deformation of the output shaft due to the stiffness of the output bearing and the associated position of the dynamic spline.
Max. axial load on output shaft (operating, constant load)
F
380 N
P-046
x
P-046:Max. permissible axial load on the output shaft (in operation, force applied impulsively)
Describes the maximum permissible axial load on the output shaft, whereby the drive is in operation, i.e., is turning, and the force is applied impulsively. Decisive for the determination is the dynamic load bearing capacity of the ball bearings, which, in the impulsive case, corresponds to just one third of Cr, as well as the elastic deformation of the output shaft due to the stiffness of the output bearing and the associated change in position of the dynamic spline.
Max. axial load on output shaft (operating, impulsive load)
F
127 N
P-055
x
P-055:The moment of inertia specifies a body’s resistance to change its rotational movement.
Moment of inertia
I
900023 * 10-4 gcm2
Motor data: Stepper VSS 19.200.0,3-UHV-4LP-2g5 dry lubrication
P-100
x
P-100:
Motortype
Stepper
P-102
x
P-102:The maximum speed of the motor describes the speed before mechanical damages occur to the commutator, the rotor or the bearing.
Maximum speed of motor
n
100 rpm
P-105
x
P-105:Describes the torque developed by the motor while at a standstill.
Holding torque of motor (unpowered)
T
0.9 mNm
P-109
x
P-109:The phase current that may flow through both phase coils without the motor overheating while at an ambient temperature of 20°C and constant operation.
Rated current of motor
I
300 mA
P-111
x
P-111:The rated voltage corresponds to the voltage at which all other rated characteristic values of the motor, particularly the rated current at 20°C, are set, measured and classified.
Rated voltage of motor
U
42 V
P-112
x
P-112:The phase resistance describes the ohmic resistance of the coil of a phase at an ambient temperature of 20°C in the steady state.
Phase resistance of motor
R
6 ohm
P-113
x
P-113:Describes the inductance of the coil of a phase at an ambient temperature measured at 1 kHz.
Inductance of motor
L
2.2 mH
P-115
x
P-115:The full step angle of the motor describes the angle at which the rotor turns if a phase is advanced.
Full step angle of motor
1.8 °
P-116
x
P-116:The angular accuracy of step describes the deviation of the current rotor position from the ideal target rotor position, whereby no external load is applied.
Angular accuracy of step of motor
±0.09 °
P-117
x
P-117:The electrical time constant describes the time required to achieve 67% of the possible phase current of a specified operating point.
Electrical time constant of motor
t
0.367 ms
P-118
x
P-118:The maximum temperature that may occur in the coil without destroying the magnets or the coil.
The coil temperature can be calculated by measuring the change in resistance and the temperature coefficient alpha, which is dependent on the coil wire material. T1 = 1/alpha * (R1/R0 + alpha*T0 – 1)
Max. coil temperature of motor
T
300 °C
Material information
P-900
x
P-900:At Micromotion GmbH, hazardous materials, which are referred to in EU directive 2011/65/EU, are purchased/used only in compliance with this directive.
RoHS compliant
ja
P-901
x
P-901:
Lubrication of output bearing gearbox
MoS2 (dry lubrication)
P-903
x
P-903:
Lubrication of gear component set
Molykote BR 2 plus
P-904
x
P-904:
Lubrication of bearing motor
dry coated
P-908
x
P-908:
Material of gear component set
NiFe
P-909
x
P-909:
Material of output bearing gearbox
1.4108 DIN EN
P-911
x
P-911:
Material of bearing motor
Stainless steel
P-912
x
P-912:
Material of gearbox output side
1.4305 DIN EN
P-914
x
P-914:
Material of motor housing
Stainless steel
Axis 3: rotational axis with magnet adapter
Nr.
Parameter
Symbol
Value
Material information
P-003
x
P-003:The reduction ratio describes the relationship between the input movement and the output movement. With a reduction ratio, the output movement is smaller than the input movement.
Ratio
i
160 : 1
P-004
x
P-004:With self-locking, the forces caused by friction are always greater than the applied adjustment forces due to the geometric relationships of the sliding partners. Due to the geometric conditions, the sliding partner in which the force is initiated cannot be moved relative to the sliding parter on which the adjustment force is applied.
Self-locking
ja
P-008
x
P-008:The unidirectional repeatability describes the positional uncertainty that arises when repeatedly approaching a setpoint from the same direction with no load.
The repeatability is defined as half of the maximum difference together with a +/- sign.
Repeatability unidirectional
12.025 arcsec
P-009
x
P-009:The bidirectional repeatability describes the positional uncertainty that arises when repeatedly approaching a setpoint from the opposite direction with no load.
The repeatability is defined as half of the maximum difference together with a +/- sign.
Repeatability bidirectional
20.0675 arcmin
P-010
x
P-010:The positioning accuracy of a gear describes the maximum deviation of the output angle relative to the setpoint or, with a linear actuator, the maximum deviation of the output position relative to the setpoint.
The measurement is performed during a complete rotation of the output element or a complete traverse of the travel range path with the aid of a high-resolution measurement system.
There is no change in the direction of rotation or direction reversal.
The positioning accuracy is defined as the absolute value of the maximum difference between the theoretical setpoint position and the measured actual position of the output element.
Accuracy
15.135 arcmin
P-011
x
P-011:The transmission accuracy of a gear describes the linearity error between input and output angle.
The measurement is performed during a complete rotation of the output element with the aid of a high-resolution measurement system.
There is no change in the direction of rotation.
The transmission accuracy is defined as the sum of the absolute values of the maximum positive and negative deviation between the theoretical and the measured angular position of the output shaft.
Transmission accuracy
30.27 arcmin
P-012
x
P-012:The positioning resolution refers to the smallest angular change or positional change that can be distinguished by the positioning system.
With eccentric systems, the characteristic of the linearly resulting positioning resolution is described as a function of the angular position and thereby indicates the smallest positional change as a function of the angular position that can be distinguished by the positioning system.
With eccentric systems, it is defined such that at an angular position of 0 degrees, the eccentric is perpendicular to the resulting movement direction.
Resolution
0.01125 °
P-013
x
P-013:The torsional stiffness can be ascertained from the characteristic of the hysteresis curve of a gear.
The torsional stiffness is defined as the slope of the hysteresis line and describes the elastic torsional angle of the output shaft as a function of a torque.
The hysteresis curve is determined by subjecting the output to load while the input is blocked with a clockwise and an anticlockwise torque and the corresponding angular displacement measured.
Torsional stiffness
9.30 Nm/rad
P-014
x
P-014:The value for the lost motion can be ascertained from the characteristic of the hysteresis curve of a gear or linear actuator.
Lost motion is defined as the angular difference or position difference at which the two branches of the hysteresis curve cross the torque or force zero point, i.e., no load is applied.
The hysteresis curve is determined by subjecting the output to load while the input is blocked with a clockwise and an anticlockwise torque or a forward-acting and a backward-acting force and the corresponding angular displacement or positional change measured.
Lost motion
20 arcmin
P-015
x
P-015:The backlash can be determined from the course of the hysteresis curve of a gear or mechanical transmission system. The backlash is defined as the range in which the course of the hysteresis curve is vertical, i.e. there is a change in angle or position without changing the torque or force. The hysteresis curve is determined by loading the output with a clockwise and counterclockwise torque or force when the drive is blocked and measuring the associated angular torsion.
Backlash
0 arcmin
P-016
x
P-016:Rated torque or rated force is defined as the torque or force at which the service life is achieved under rated conditions, i.e., rated speed.
With drive systems, the motor torque may, in some cases, not be adequate for overcoming the running torque of the complete system under rated conditions.
Rated torque
T
12 mNm
P-017
x
P-017:The peak torque or peak force is the loading of the components in the drive train, e.g., the teeth of the gears, still below the fatigue strength.
This does, however, result in increased tooth wear, which leads to a reduction in the service life.
With drive systems, the motor torque may, in some cases, not be adequate for overcoming the running torque of the complete system at peak torque or peak force.
Peak torque
T
24 mNm
P-018
x
P-018:The momentary peak torque or momentary peak force describes the maximum permissible torque or force that can act on the actuator. If the momentary peak torque or momentary peak force is exceeded, damage or a reduced life time of the actuator cannot be ruled out. With momentary peak torque or momentary peak force, the elastic deformations of the teeth are still small enough that no tooth meshing problems occur and proper function is ensured. The loads do, however, exceed the limit of the fatigue strength. Thus, the number of loads should be minimised. Should it occur once, breakage or failure will not result. With drive systems, the motor torque may, in some cases, not be adequate for overcoming the running torque of the complete system at momentary peak torque or momentary peak force. In drive systems, the motor torque may not be sufficient to generate enough torque to meet the permissible momentary peak torque or momentary peak force. On the other hand, in drive systems, the existing motor torque can be so high that the drive system can exceed the permissible momentary peak torque or momentary peak force and the drive system can be damaged.
Momentary peak torque
T
55 mNm
P-021
x
P-021:Rated input speed is defined as the speed at which the service life is achieved under rated conditions, i.e., rated torque.
With drive systems, the motor torque may, in some cases, not be adequate for overcoming the running torque of the complete system at rated speed.
Rated input speed
n
100 rpm
P-022
x
P-022:The maximum input speed refers to the speed before which mechanical damages occur to components in the drive train, e.g., scoring of the teeth or damage to the ball bearings.
With drive systems, the motor torque may, in some cases, not be adequate for overcoming the running torque of the complete system at maximum speed.
Maximum input speed
n
100 rpm
P-023
x
P-023:Rated output speed or rated speed is defined as the speed at which the service life is achieved under rated conditions, i.e., rated torque or rated force.
With drive systems, the motor torque may, in some cases, not be adequate for overcoming the running torque of the complete system at rated speed.
Rated output speed
n
0.625 rpm
P-024
x
P-024:The maximum output speed or maximum speed refers to the speed before which mechanical damages occur to components in the drive train, e.g., scoring of the teeth.
With drive systems, the motor torque may, in some cases, not be adequate for overcoming the running torque of the complete system at maximum speed.
Maximum output speed
n
0.625 rpm
P-026
x
P-026:The no-load starting torque describes the torque necessary for putting the gear into rotary motion without additional output-side load at 20°C and standard lubricant.
No-load starting torque
T
75 μNm
P-027
x
P-027:The running torque describes the torque necessary for driving the gear without additional output-side load at 20°C and standard lubricant at constant speed.
No-load running torque
T
50 μNm
P-028
x
P-028:The rated running torque describes the input-side torque that is required to operate the gear in rated operation, i.e., at rated torque and rated speed.
Rated running torque
T
670 μNm
P-035
x
P-035:The backlash can be determined from the course of the hysteresis curve of a gear or mechanical transmission system. The backlash is defined as the range in which the course of the hysteresis curve is vertical, i.e. there is a change in angle or position without changing the torque or force. The hysteresis curve is determined by loading the output with a clockwise and counterclockwise torque or force when the drive is blocked and measuring the associated angular torsion.
Radial backlash output shaft
0 μm
P-036
x
P-036:The backlash can be determined from the course of the hysteresis curve of a gear or mechanical transmission system. The backlash is defined as the range in which the course of the hysteresis curve is vertical, i.e. there is a change in angle or position without changing the torque or force. The hysteresis curve is determined by loading the output with a clockwise and counterclockwise torque or force when the drive is blocked and measuring the associated angular torsion.
Axial backlash output shaft
0 μm
P-037
x
P-037:Stiffness of the bearing in the radial direction, i.e., elastic deflection of the mounted shaft in the radial direction as a function of the applied force.
Radial stiffness
c
2.31 N/μm
P-038
x
P-038:Stiffness of the bearing in the axial direction, i.e., elastic deflection of the mounted shaft in the axial direction as a function of the applied force.
Axial stiffness
c
40 N/μm
P-039
x
P-039:Max. permissible radial load on the output shaft (not in operation, force applied constantly)
Describes the maximum permissible radial load on the output shaft, whereby the drive is not in operation, i.e., is at a standstill and the force is applied statically. The static load-bearing capacity of the ball bearings Co and the geometric relationships from the point of force application and the bearing distance are decisive for the determination. For the permissible force, the worst case is assumed as the point of force application, i.e., the maximum distance between the ball bearings and the end of the output shaft.
Max. radial load on output shaft (non-operating, constant load)
F
55 N
P-040
x
P-040:Max. permissible radial load on the output shaft (not in operation, force applied impulsively)
Describes the maximum permissible radial load on the output shaft, whereby the drive is not in operation, i.e., is at a standstill and the force is applied impulsively. The load-bearing capacity of the ball bearings is decisive for the determination. With impulsive loading, the permissible load-bearing capacity of the bearings is reduced to one third of Co.
Max. radial load on output shaft (non-operating, impulsive load)
F
20 N
P-041
x
P-041:Max. permissible radial load on the output shaft (in operation, force applied constantly)
Describes the maximum permissible radial load on the output shaft, whereby the drive is in operation and the force is applied statically. Particularly important for the determination of the permissible force in the dynamic case are, in addition to the load-bearing capacity of the ball bearings, the stiffness of the bearing and the run-out error on the dynamic spline caused by elastic deformation. For the permissible force, the worst case is assumed as the point of force application, i.e., the maximum distance between the ball bearings and the end of the output shaft.
Max. radial load on output shaft (operating, constant load)
F
7 N
P-042
x
P-042:Max. permissible radial load on the output shaft (in operation, force applied impulsively)
Describes the maximum permissible radial load on the output shaft, whereby the drive is in operation, i.e., is turning, and the force is applied impulsively. With impulsive loading, the permissible dynamic load-bearing capacity of the ball bearings is reduced to one third of Cr. Likewise decisive for the determination are, in addition to the load-bearing capacity of the ball bearings, the elastic deformation of the output shaft near the dynamic spline and the associated run-out error due to the stiffness of the bearing.
Max. radial load on output shaft (operating, impulsive load)
F
7 N
P-043
x
P-043:Max. permissible axial load on the output shaft (not in operation, force applied constantly)
Describes the maximum permissible axial load on the output shaft, whereby the drive is not in operation, i.e., is at a standstill and the force is applied statically. Decisive for the determination is the static load bearing capacity of the ball bearings as well as the elastic deformation of the output shaft due to the stiffness of the output bearing and the associated position of the dynamic spline.
Max. axial load on output shaft (non-operating, constant
F
150 N
P-044
x
P-044:Max. permissible axial load on the output shaft (not in operation, force applied impulsively)
Describes the maximum permissible axial load on the output shaft, whereby the drive is not in operation, i.e., is at a standstill and the force is applied impulsively. Decisive for the determination is the static load bearing capacity of the ball bearings, which, in the impulsive case, corresponds to just one third of Co, as well as the elastic deformation of the output shaft due to the stiffness of the output bearing and the associated position of the dynamic spline.
Max. axial load on output shaft (non-operating, impulsive load)
F
50 N
P-045
x
P-045:Max. permissible axial load on the output shaft (in operation, force applied constantly)
Describes the maximum permissible axial load on the output shaft, whereby the drive is in operation, i.e., is turning, and the force is applied statically. Decisive for the determination is the dynamic load bearing capacity of the ball bearings as well as the elastic deformation of the output shaft due to the stiffness of the output bearing and the associated position of the dynamic spline.
Max. axial load on output shaft (operating, constant load)
F
380 N
P-046
x
P-046:Max. permissible axial load on the output shaft (in operation, force applied impulsively)
Describes the maximum permissible axial load on the output shaft, whereby the drive is in operation, i.e., is turning, and the force is applied impulsively. Decisive for the determination is the dynamic load bearing capacity of the ball bearings, which, in the impulsive case, corresponds to just one third of Cr, as well as the elastic deformation of the output shaft due to the stiffness of the output bearing and the associated change in position of the dynamic spline.
Max. axial load on output shaft (operating, impulsive load)
F
127 N
P-055
x
P-055:The moment of inertia specifies a body’s resistance to change its rotational movement.
Moment of inertia
I
900023 * 10-4 gcm2
Motor data: Stepper VSS 19.200.0,3-UHV-4LP-2g5 dry lubrication
P-100
x
P-100:
Motortype
Stepper
P-102
x
P-102:The maximum speed of the motor describes the speed before mechanical damages occur to the commutator, the rotor or the bearing.
Maximum speed of motor
n
100 rpm
P-105
x
P-105:Describes the torque developed by the motor while at a standstill.
Holding torque of motor (unpowered)
T
0.9 mNm
P-109
x
P-109:The phase current that may flow through both phase coils without the motor overheating while at an ambient temperature of 20°C and constant operation.
Rated current of motor
I
300 mA
P-111
x
P-111:The rated voltage corresponds to the voltage at which all other rated characteristic values of the motor, particularly the rated current at 20°C, are set, measured and classified.
Rated voltage of motor
U
42 V
P-112
x
P-112:The phase resistance describes the ohmic resistance of the coil of a phase at an ambient temperature of 20°C in the steady state.
Phase resistance of motor
R
6 ohm
P-113
x
P-113:Describes the inductance of the coil of a phase at an ambient temperature measured at 1 kHz.
Inductance of motor
L
2.2 mH
P-115
x
P-115:The full step angle of the motor describes the angle at which the rotor turns if a phase is advanced.
Full step angle of motor
1.8 °
P-116
x
P-116:The angular accuracy of step describes the deviation of the current rotor position from the ideal target rotor position, whereby no external load is applied.
Angular accuracy of step of motor
±0.09 °
P-117
x
P-117:The electrical time constant describes the time required to achieve 67% of the possible phase current of a specified operating point.
Electrical time constant of motor
t
0.367 ms
P-118
x
P-118:The maximum temperature that may occur in the coil without destroying the magnets or the coil.
The coil temperature can be calculated by measuring the change in resistance and the temperature coefficient alpha, which is dependent on the coil wire material. T1 = 1/alpha * (R1/R0 + alpha*T0 – 1)
Max. coil temperature of motor
T
300 °C
Material information
P-900
x
P-900:At Micromotion GmbH, hazardous materials, which are referred to in EU directive 2011/65/EU, are purchased/used only in compliance with this directive.
RoHS compliant
ja
P-901
x
P-901:
Lubrication of output bearing gearbox
MoS2 (dry lubrication)
P-903
x
P-903:
Lubrication of gear component set
Molykote BR 2 plus
P-904
x
P-904:
Lubrication of bearing motor
dry coated
P-908
x
P-908:
Material of gear component set
NiFe
P-909
x
P-909:
Material of output bearing gearbox
1.4108 DIN EN
P-911
x
P-911:
Material of bearing motor
Stainless steel
P-912
x
P-912:
Material of gearbox output side
1.4305 DIN EN
P-914
x
P-914:
Material of motor housing
Stainless steel
Axis 4: rotational axis with magnet adapter
Nr.
Parameter
Symbol
Value
Material information
P-003
x
P-003:The reduction ratio describes the relationship between the input movement and the output movement. With a reduction ratio, the output movement is smaller than the input movement.
Ratio
i
160 : 1
P-004
x
P-004:With self-locking, the forces caused by friction are always greater than the applied adjustment forces due to the geometric relationships of the sliding partners. Due to the geometric conditions, the sliding partner in which the force is initiated cannot be moved relative to the sliding parter on which the adjustment force is applied.
Self-locking
ja
P-008
x
P-008:The unidirectional repeatability describes the positional uncertainty that arises when repeatedly approaching a setpoint from the same direction with no load.
The repeatability is defined as half of the maximum difference together with a +/- sign.
Repeatability unidirectional
12.025 arcsec
P-009
x
P-009:The bidirectional repeatability describes the positional uncertainty that arises when repeatedly approaching a setpoint from the opposite direction with no load.
The repeatability is defined as half of the maximum difference together with a +/- sign.
Repeatability bidirectional
20.0675 arcmin
P-010
x
P-010:The positioning accuracy of a gear describes the maximum deviation of the output angle relative to the setpoint or, with a linear actuator, the maximum deviation of the output position relative to the setpoint.
The measurement is performed during a complete rotation of the output element or a complete traverse of the travel range path with the aid of a high-resolution measurement system.
There is no change in the direction of rotation or direction reversal.
The positioning accuracy is defined as the absolute value of the maximum difference between the theoretical setpoint position and the measured actual position of the output element.
Accuracy
15.135 arcmin
P-011
x
P-011:The transmission accuracy of a gear describes the linearity error between input and output angle.
The measurement is performed during a complete rotation of the output element with the aid of a high-resolution measurement system.
There is no change in the direction of rotation.
The transmission accuracy is defined as the sum of the absolute values of the maximum positive and negative deviation between the theoretical and the measured angular position of the output shaft.
Transmission accuracy
30.27 arcmin
P-012
x
P-012:The positioning resolution refers to the smallest angular change or positional change that can be distinguished by the positioning system.
With eccentric systems, the characteristic of the linearly resulting positioning resolution is described as a function of the angular position and thereby indicates the smallest positional change as a function of the angular position that can be distinguished by the positioning system.
With eccentric systems, it is defined such that at an angular position of 0 degrees, the eccentric is perpendicular to the resulting movement direction.
Resolution
0.01125 °
P-013
x
P-013:The torsional stiffness can be ascertained from the characteristic of the hysteresis curve of a gear.
The torsional stiffness is defined as the slope of the hysteresis line and describes the elastic torsional angle of the output shaft as a function of a torque.
The hysteresis curve is determined by subjecting the output to load while the input is blocked with a clockwise and an anticlockwise torque and the corresponding angular displacement measured.
Torsional stiffness
9.30 Nm/rad
P-014
x
P-014:The value for the lost motion can be ascertained from the characteristic of the hysteresis curve of a gear or linear actuator.
Lost motion is defined as the angular difference or position difference at which the two branches of the hysteresis curve cross the torque or force zero point, i.e., no load is applied.
The hysteresis curve is determined by subjecting the output to load while the input is blocked with a clockwise and an anticlockwise torque or a forward-acting and a backward-acting force and the corresponding angular displacement or positional change measured.
Lost motion
20 arcmin
P-015
x
P-015:The backlash can be determined from the course of the hysteresis curve of a gear or mechanical transmission system. The backlash is defined as the range in which the course of the hysteresis curve is vertical, i.e. there is a change in angle or position without changing the torque or force. The hysteresis curve is determined by loading the output with a clockwise and counterclockwise torque or force when the drive is blocked and measuring the associated angular torsion.
Backlash
0 arcmin
P-016
x
P-016:Rated torque or rated force is defined as the torque or force at which the service life is achieved under rated conditions, i.e., rated speed.
With drive systems, the motor torque may, in some cases, not be adequate for overcoming the running torque of the complete system under rated conditions.
Rated torque
T
12 mNm
P-017
x
P-017:The peak torque or peak force is the loading of the components in the drive train, e.g., the teeth of the gears, still below the fatigue strength.
This does, however, result in increased tooth wear, which leads to a reduction in the service life.
With drive systems, the motor torque may, in some cases, not be adequate for overcoming the running torque of the complete system at peak torque or peak force.
Peak torque
T
24 mNm
P-018
x
P-018:The momentary peak torque or momentary peak force describes the maximum permissible torque or force that can act on the actuator. If the momentary peak torque or momentary peak force is exceeded, damage or a reduced life time of the actuator cannot be ruled out. With momentary peak torque or momentary peak force, the elastic deformations of the teeth are still small enough that no tooth meshing problems occur and proper function is ensured. The loads do, however, exceed the limit of the fatigue strength. Thus, the number of loads should be minimised. Should it occur once, breakage or failure will not result. With drive systems, the motor torque may, in some cases, not be adequate for overcoming the running torque of the complete system at momentary peak torque or momentary peak force. In drive systems, the motor torque may not be sufficient to generate enough torque to meet the permissible momentary peak torque or momentary peak force. On the other hand, in drive systems, the existing motor torque can be so high that the drive system can exceed the permissible momentary peak torque or momentary peak force and the drive system can be damaged.
Momentary peak torque
T
55 mNm
P-021
x
P-021:Rated input speed is defined as the speed at which the service life is achieved under rated conditions, i.e., rated torque.
With drive systems, the motor torque may, in some cases, not be adequate for overcoming the running torque of the complete system at rated speed.
Rated input speed
n
100 rpm
P-022
x
P-022:The maximum input speed refers to the speed before which mechanical damages occur to components in the drive train, e.g., scoring of the teeth or damage to the ball bearings.
With drive systems, the motor torque may, in some cases, not be adequate for overcoming the running torque of the complete system at maximum speed.
Maximum input speed
n
100 rpm
P-023
x
P-023:Rated output speed or rated speed is defined as the speed at which the service life is achieved under rated conditions, i.e., rated torque or rated force.
With drive systems, the motor torque may, in some cases, not be adequate for overcoming the running torque of the complete system at rated speed.
Rated output speed
n
0.625 rpm
P-024
x
P-024:The maximum output speed or maximum speed refers to the speed before which mechanical damages occur to components in the drive train, e.g., scoring of the teeth.
With drive systems, the motor torque may, in some cases, not be adequate for overcoming the running torque of the complete system at maximum speed.
Maximum output speed
n
0.625 rpm
P-026
x
P-026:The no-load starting torque describes the torque necessary for putting the gear into rotary motion without additional output-side load at 20°C and standard lubricant.
No-load starting torque
T
75 μNm
P-027
x
P-027:The running torque describes the torque necessary for driving the gear without additional output-side load at 20°C and standard lubricant at constant speed.
No-load running torque
T
50 μNm
P-028
x
P-028:The rated running torque describes the input-side torque that is required to operate the gear in rated operation, i.e., at rated torque and rated speed.
Rated running torque
T
670 μNm
P-035
x
P-035:The backlash can be determined from the course of the hysteresis curve of a gear or mechanical transmission system. The backlash is defined as the range in which the course of the hysteresis curve is vertical, i.e. there is a change in angle or position without changing the torque or force. The hysteresis curve is determined by loading the output with a clockwise and counterclockwise torque or force when the drive is blocked and measuring the associated angular torsion.
Radial backlash output shaft
0 μm
P-036
x
P-036:The backlash can be determined from the course of the hysteresis curve of a gear or mechanical transmission system. The backlash is defined as the range in which the course of the hysteresis curve is vertical, i.e. there is a change in angle or position without changing the torque or force. The hysteresis curve is determined by loading the output with a clockwise and counterclockwise torque or force when the drive is blocked and measuring the associated angular torsion.
Axial backlash output shaft
0 μm
P-037
x
P-037:Stiffness of the bearing in the radial direction, i.e., elastic deflection of the mounted shaft in the radial direction as a function of the applied force.
Radial stiffness
c
2.31 N/μm
P-038
x
P-038:Stiffness of the bearing in the axial direction, i.e., elastic deflection of the mounted shaft in the axial direction as a function of the applied force.
Axial stiffness
c
40 N/μm
P-039
x
P-039:Max. permissible radial load on the output shaft (not in operation, force applied constantly)
Describes the maximum permissible radial load on the output shaft, whereby the drive is not in operation, i.e., is at a standstill and the force is applied statically. The static load-bearing capacity of the ball bearings Co and the geometric relationships from the point of force application and the bearing distance are decisive for the determination. For the permissible force, the worst case is assumed as the point of force application, i.e., the maximum distance between the ball bearings and the end of the output shaft.
Max. radial load on output shaft (non-operating, constant load)
F
55 N
P-040
x
P-040:Max. permissible radial load on the output shaft (not in operation, force applied impulsively)
Describes the maximum permissible radial load on the output shaft, whereby the drive is not in operation, i.e., is at a standstill and the force is applied impulsively. The load-bearing capacity of the ball bearings is decisive for the determination. With impulsive loading, the permissible load-bearing capacity of the bearings is reduced to one third of Co.
Max. radial load on output shaft (non-operating, impulsive load)
F
20 N
P-041
x
P-041:Max. permissible radial load on the output shaft (in operation, force applied constantly)
Describes the maximum permissible radial load on the output shaft, whereby the drive is in operation and the force is applied statically. Particularly important for the determination of the permissible force in the dynamic case are, in addition to the load-bearing capacity of the ball bearings, the stiffness of the bearing and the run-out error on the dynamic spline caused by elastic deformation. For the permissible force, the worst case is assumed as the point of force application, i.e., the maximum distance between the ball bearings and the end of the output shaft.
Max. radial load on output shaft (operating, constant load)
F
7 N
P-042
x
P-042:Max. permissible radial load on the output shaft (in operation, force applied impulsively)
Describes the maximum permissible radial load on the output shaft, whereby the drive is in operation, i.e., is turning, and the force is applied impulsively. With impulsive loading, the permissible dynamic load-bearing capacity of the ball bearings is reduced to one third of Cr. Likewise decisive for the determination are, in addition to the load-bearing capacity of the ball bearings, the elastic deformation of the output shaft near the dynamic spline and the associated run-out error due to the stiffness of the bearing.
Max. radial load on output shaft (operating, impulsive load)
F
7 N
P-043
x
P-043:Max. permissible axial load on the output shaft (not in operation, force applied constantly)
Describes the maximum permissible axial load on the output shaft, whereby the drive is not in operation, i.e., is at a standstill and the force is applied statically. Decisive for the determination is the static load bearing capacity of the ball bearings as well as the elastic deformation of the output shaft due to the stiffness of the output bearing and the associated position of the dynamic spline.
Max. axial load on output shaft (non-operating, constant
F
150 N
P-044
x
P-044:Max. permissible axial load on the output shaft (not in operation, force applied impulsively)
Describes the maximum permissible axial load on the output shaft, whereby the drive is not in operation, i.e., is at a standstill and the force is applied impulsively. Decisive for the determination is the static load bearing capacity of the ball bearings, which, in the impulsive case, corresponds to just one third of Co, as well as the elastic deformation of the output shaft due to the stiffness of the output bearing and the associated position of the dynamic spline.
Max. axial load on output shaft (non-operating, impulsive load)
F
50 N
P-045
x
P-045:Max. permissible axial load on the output shaft (in operation, force applied constantly)
Describes the maximum permissible axial load on the output shaft, whereby the drive is in operation, i.e., is turning, and the force is applied statically. Decisive for the determination is the dynamic load bearing capacity of the ball bearings as well as the elastic deformation of the output shaft due to the stiffness of the output bearing and the associated position of the dynamic spline.
Max. axial load on output shaft (operating, constant load)
F
380 N
P-046
x
P-046:Max. permissible axial load on the output shaft (in operation, force applied impulsively)
Describes the maximum permissible axial load on the output shaft, whereby the drive is in operation, i.e., is turning, and the force is applied impulsively. Decisive for the determination is the dynamic load bearing capacity of the ball bearings, which, in the impulsive case, corresponds to just one third of Cr, as well as the elastic deformation of the output shaft due to the stiffness of the output bearing and the associated change in position of the dynamic spline.
Max. axial load on output shaft (operating, impulsive load)
F
127 N
P-055
x
P-055:The moment of inertia specifies a body’s resistance to change its rotational movement.
Moment of inertia
I
900023 * 10-4 gcm2
Motor data: Stepper VSS 19.200.0,3-UHV-4LP-2g5 dry lubrication
P-100
x
P-100:
Motortype
Stepper
P-102
x
P-102:The maximum speed of the motor describes the speed before mechanical damages occur to the commutator, the rotor or the bearing.
Maximum speed of motor
n
100 rpm
P-105
x
P-105:Describes the torque developed by the motor while at a standstill.
Holding torque of motor (unpowered)
T
0.9 mNm
P-109
x
P-109:The phase current that may flow through both phase coils without the motor overheating while at an ambient temperature of 20°C and constant operation.
Rated current of motor
I
300 mA
P-111
x
P-111:The rated voltage corresponds to the voltage at which all other rated characteristic values of the motor, particularly the rated current at 20°C, are set, measured and classified.
Rated voltage of motor
U
42 V
P-112
x
P-112:The phase resistance describes the ohmic resistance of the coil of a phase at an ambient temperature of 20°C in the steady state.
Phase resistance of motor
R
6 ohm
P-113
x
P-113:Describes the inductance of the coil of a phase at an ambient temperature measured at 1 kHz.
Inductance of motor
L
2.2 mH
P-115
x
P-115:The full step angle of the motor describes the angle at which the rotor turns if a phase is advanced.
Full step angle of motor
1.8 °
P-116
x
P-116:The angular accuracy of step describes the deviation of the current rotor position from the ideal target rotor position, whereby no external load is applied.
Angular accuracy of step of motor
±0.09 °
P-117
x
P-117:The electrical time constant describes the time required to achieve 67% of the possible phase current of a specified operating point.
Electrical time constant of motor
t
0.367 ms
P-118
x
P-118:The maximum temperature that may occur in the coil without destroying the magnets or the coil.
The coil temperature can be calculated by measuring the change in resistance and the temperature coefficient alpha, which is dependent on the coil wire material. T1 = 1/alpha * (R1/R0 + alpha*T0 – 1)
Max. coil temperature of motor
T
300 °C
Material information
P-900
x
P-900:At Micromotion GmbH, hazardous materials, which are referred to in EU directive 2011/65/EU, are purchased/used only in compliance with this directive.
RoHS compliant
ja
P-901
x
P-901:
Lubrication of output bearing gearbox
MoS2 (dry lubrication)
P-903
x
P-903:
Lubrication of gear component set
Molykote BR 2 plus
P-904
x
P-904:
Lubrication of bearing motor
dry coated
P-908
x
P-908:
Material of gear component set
NiFe
P-909
x
P-909:
Material of output bearing gearbox
1.4108 DIN EN
P-911
x
P-911:
Material of bearing motor
Stainless steel
P-912
x
P-912:
Material of gearbox output side
1.4305 DIN EN
P-914
x
P-914:
Material of motor housing
Stainless steel
Graphs
P-019
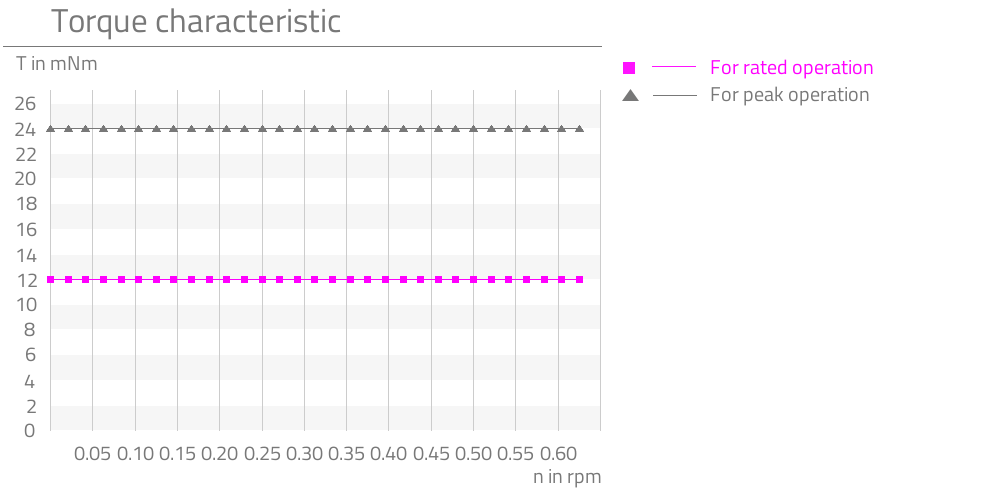
P-029
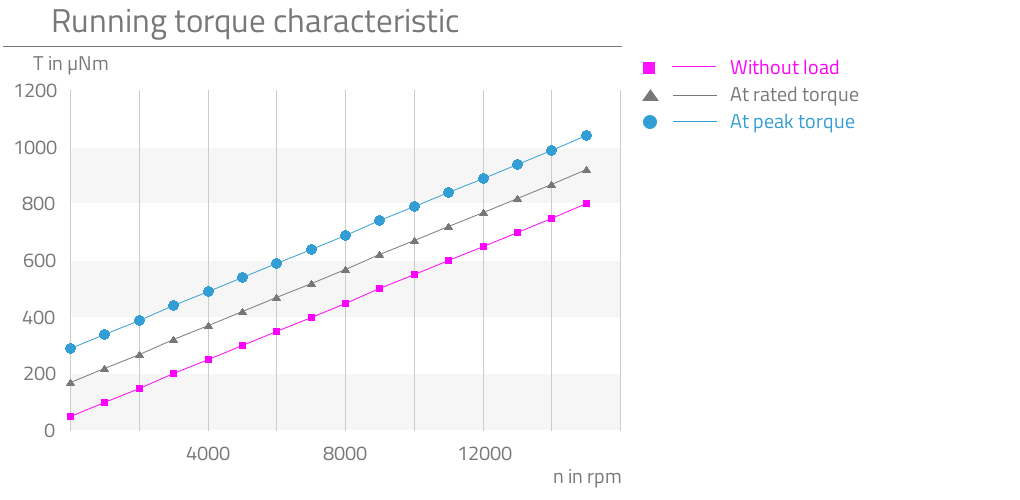
P-019
P-029
P-019
P-029
P-019
P-029
Alternative products
High repeatability
Preloaded ball bearing
Robust control without feedback system
Custom designed output shaft
Zero backlash with optimised fit between speed and resolution

Corrosional consistent materials
Robust control without feedback system
High adjustment force
Ball screw
Step with in the range of nm

Flexible integration
Vacuum suitable lubrication
Use of high quality materials
Preloaded ball bearing
Transmission ratio optimized to torque

Zero backlash
Compact build up
Lifetime lubrication
Simple integration to the application
Robust control without feedback system

Hollow shaft thru center of rotational axis
High reliability
Lifetime lubrication
Preloaded ball bearing
Transmission ratio optimized to speed

Suitable in wide temperature range
Dry lubrication due to coatings
Robust control without feedback system
Zero backlash at optimised fit between speed and resolution
Step with in the range of nm
High reliability
Extreme dynamic
Preloaded ball bearing
Robust control without feedback system
High speed
Fast delivery
High repeatability
Flexible integration
Preloaded ball bearing
Zero backlash with high transmission ratio