KeevoDrive® HighAcc 20mm – Type 1
Das Mikropositioniersystem KeevoDrive® HighAcc 20mm – Type 1 kombiniert einen Exzenterantriebssystem mit einer Festkörpergelenkkinematik, wodurch Bewegungen im einstelligen Nanometerbereich realisiert werden.
Die Festkörpergelenkkinematik besteht zum einen aus einem Hebelsystem zur weiteren Untersetzung der Bewegung, zum anderen aus den Linearführungen für die Anbindung der Anwendung.
Das System kann einfach im offenen Regelkreis betrieben werden, da es durch einen Schrittmotor mit 20 Schritten pro Umdrehung angetrieben wird.
Im Kern dieses Mikrosystems findet sich ein spielfreies MaalonDrive® Getriebe mit einer Untersetzung von 1000:1.
Vorteile
1) Robuste Steuerung ohne Feedbacksystem
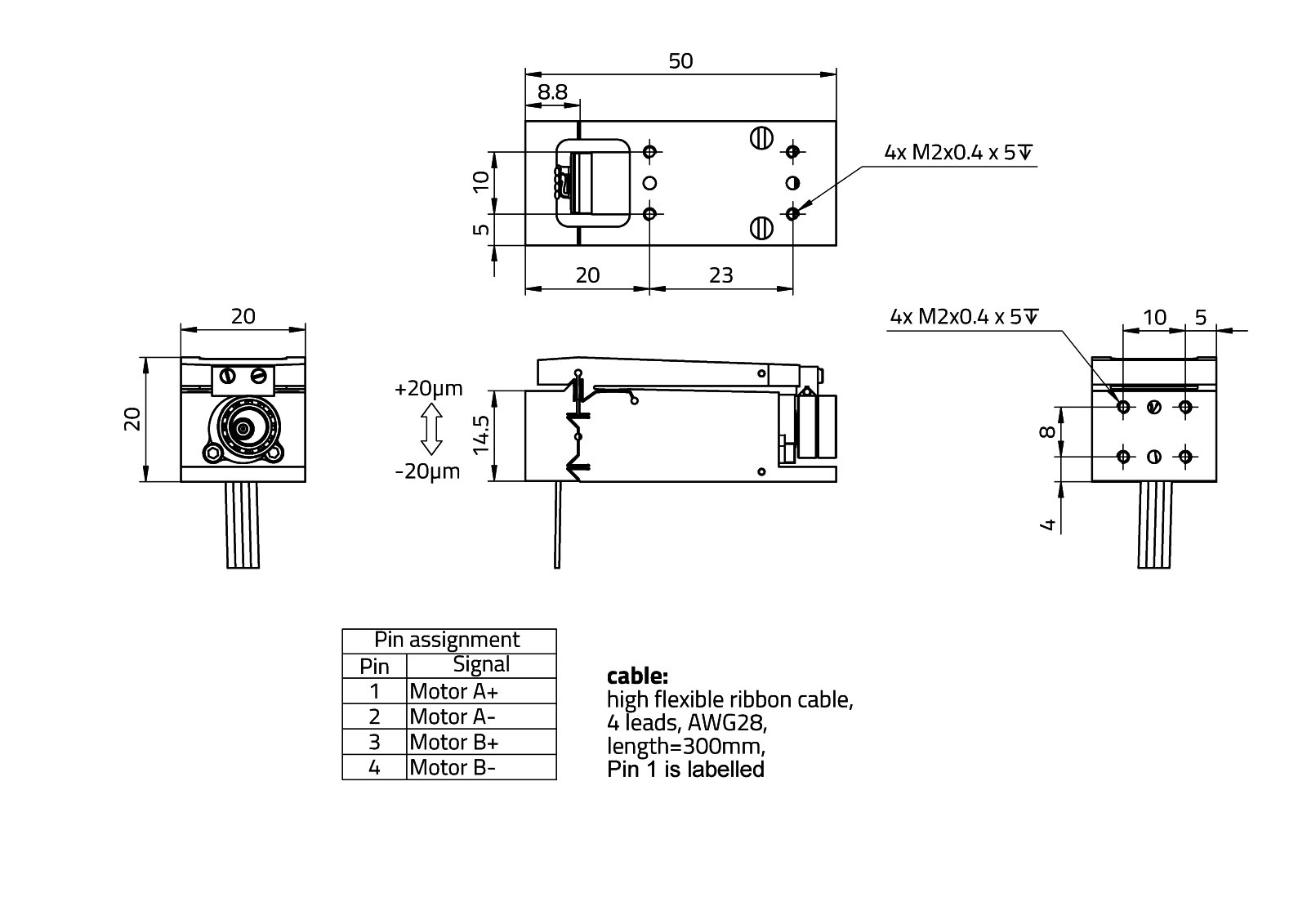
2) Anschlusskabel vorkonfektioniert
3) Spielfreiheit bei ultra hoher Auflösung
4) Integrierte Festkörperkinematik
5) Schrittweiten im einstelligen nm-Bereich
Technische Parameter
Die ausgewiesenen Werte basieren auf Berechnungen und Messverfahren der Micromotion
GmbH, die nach dem aktuellen Stand der Technik durchgeführt werden. Unsere Definitionen
finden Sie unter www.micromotion-drives.com. Für weitergehende Informationen
kontaktieren Sie bitte sales@micromotion.de.
Nr.
Parameter
Formelzeichen
Wert
Eigenschaften
P-003
Untersetzung
i
1000 : 1
P-004
Selbsthemmung
ja
P-005
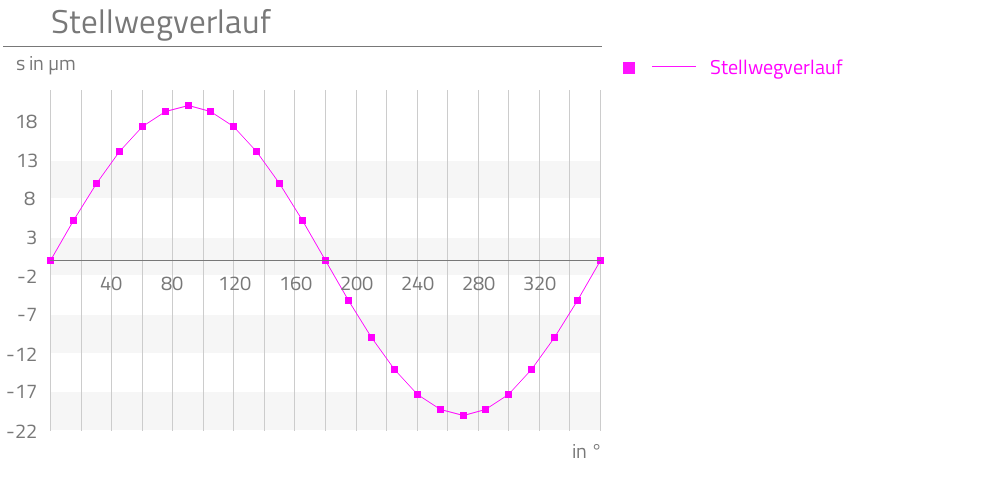
Max. Stellweg
s
40 μm
P-015
Umkehrspiel
0 μm
P-016
Nennlastkraft
F
9 N
P-017
Spitzenlastkraft
F
19 N
P-018
Kollisionslastkraft
F
47 N
P-034
Lebensdauer bei Nennbetrieb
1000 h
P-035
Abtrieb Radialspiel
0 μm
P-036
Abtrieb Axialspiel
0 μm
P-037
Radialsteifigkeit
c
69.13 N/μm
P-038
Axialsteifigkeit
c
40 N/μm
P-039
Max. zul. radiale Last auf Abtriebswelle (außer Betrieb, Kraft konstant einwirkend)
F
435 N
P-040
Max. zul. radiale Last auf Abtriebswelle (außer Betrieb, Kraft stoßartig einwirkend)
F
145 N
P-041
Max. zul. radiale Last auf Abtriebswelle (im Betrieb, Kraft konstant einwirkend)
F
98 N
P-042
Max. zul. radiale Last auf Abtriebswelle (im Betrieb, Kraft stoßartig einwirkend)
F
98 N
P-043
Max. zul. axiale Last auf Abtriebswelle (außer Betrieb, Kraft konstant einwirkend)
F
150 N
P-044
Max. zul. axiale Last auf Abtriebswelle (außer Betrieb, Kraft stoßartig einwirkend)
F
50 N
P-045
Max. zul. axiale Last auf Abtriebswelle (im Betrieb, Kraft konstant einwirkend)
F
380 N
P-046
Max. zul. axiale Last auf Abtriebswelle (im Betrieb, Kraft stoßartig einwirkend)
F
127 N
P-055
Massenträgheitsmoment
I
955 * 10-4 gcm2
P-056
Gewicht
m
54 g
P-057
Min. zul. Umgebungstemperatur (außer Betrieb)
T
-35 °C
P-058
Min. zul. Umgebungstemperatur (im Betrieb)
T
-20 °C
P-059
Max. zul. Umgebungstemperatur (außer Betrieb)
T
130 °C
P-060
Max- zul. Umgebungstemperatur (im Betrieb)
T
70 °C
Motordaten: Schrittmotor AM 1020-2R-A0.25
P-100
Motorbauart
Stepper
P-102
Grenzdrehzahl des Motors
n
21000 min-1
P-103
Resonanzfrequenz des Motors (bei Nennstrom)
f
140 Hz
P-105
Haltemoment des Motors (stromlos)
T
0.2 mNm
P-109
Nennstrom des Motors
I
250 mA
P-111
Nennspannung des Motors
U
2 V
P-112
Phasenwiderstand des Motors
R
8 Ohm
P-113
Induktivität des Motors
L
2.4 mH
P-114
Amplitude Gegen-EMK des Motors
U
0.6 mV/rpm
P-115
Vollschrittwinkel des Motors
18 °
P-116
Schrittwinkelgenauigkeit des Motors
±1.8 °
P-117
Elektrische Zeitkonstante des Motors
t
0.32 ms
P-118
Max. zulässige Wicklungstemperatur des Motors
T
130 °C
P-119
Wärmewiderstand des Motors zwischen Wicklung und Gehäuse
Rth1
3.9 K/W
P-120
Wärmewiderstand des Motors zwischen Gehäuse und Umgebungsluft
Rth2
53.8 K/W
P-121
Thermische Zeitkonstante der Motorwicklung
τw1
3200 ms
P-122
Thermische Zeitkonstante des Motorgehäuses
τw2
200000 ms
P-123
Isolations- und Prüfspannung des Motors
U
200 V
Exzenterdaten
P-501
Exzentrizität
1000 μm
P-504
Max. zul. radiale Last auf Exzenterlager (außer Betrieb, Kraft konstant einwirkend)
F
19 N
P-505
Max. zul. radiale Last auf Exzenterlager (außer Betrieb, Kraft stoßartig einwirkend)
F
19 N
P-506
Max. zul. radiale Last auf Exzenterlager (im Betrieb, Kraft konstant einwirkend)
F
19 N
P-507
Max. zul. radiale Last auf Exzenterlager (im Betrieb, Kraft stoßartig einwirkend)
F
19 N
P-508
Max. zul. axiale Last auf Exzenterlager (außer Betrieb, Kraft konstant einwirkend)
F
150 N
P-509
Max. zul. axiale Last auf Exzenterlager (außer Betrieb, Kraft stoßartig einwirkend)
F
50 N
P-510
Max. zul. axiale Last auf Exzenterlager (im Betrieb, Kraft konstant einwirkend)
F
380 N
P-511
Max. zul. axiale Last auf Exzenterlager (im Betrieb, Kraft stoßartig einwirkend)
F
127 N
P-513
Exzentrizitätsfehler
20 μm
Festkörpergelenkdaten
P-701
Untersetzung Festkörpergelenk
i
50
P-702
Max. Last auf Festkörpergelenke
F
10 N
P-703
Winkelstellung Exzenter bei min. Position
α
0 °
P-704
Winkelstellung Exzenter bei max. Position
α
360 °
Material Informationen
P-900
RoHS-konform
ja
P-901
Schmierstoff Getriebeabtriebslagerung
Longtime PD2
P-902
Schmierstoff Getriebeantriebslagerung
Fomblin GRM60
P-903
Schmierstoff Getriebeeinbausatz
Molykote BR 2 plus
P-904
Schmierstoff Motorlagerung
Synthetic light ester oil
P-907
Schmierstoff Exzenterlager
Longtime PD2
P-908
Material Getriebeeinbausatz
NiFe
P-909
Material Getriebeabtriebslagerung
1.4108 DIN EN
P-910
Material Getriebeantriebslagerung
1.4108 DIN EN
P-911
Material Motorlagerung
Stainless steel
P-912
Material abtriebsseitiges Getriebegehäuse
1.4305 DIN EN
P-914
Material Motorgehäuse
Anodized aluminum
P-915
Material Exzenterlager
1.4108 DIN EN
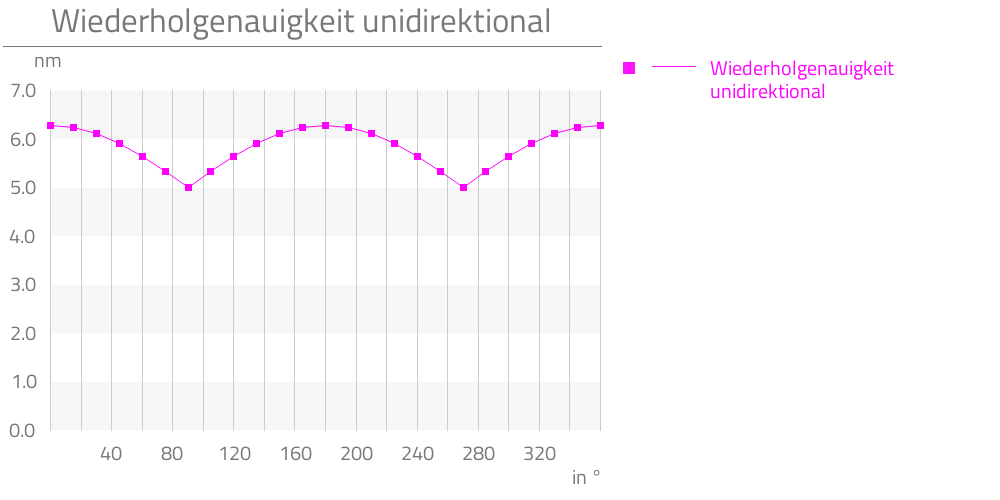
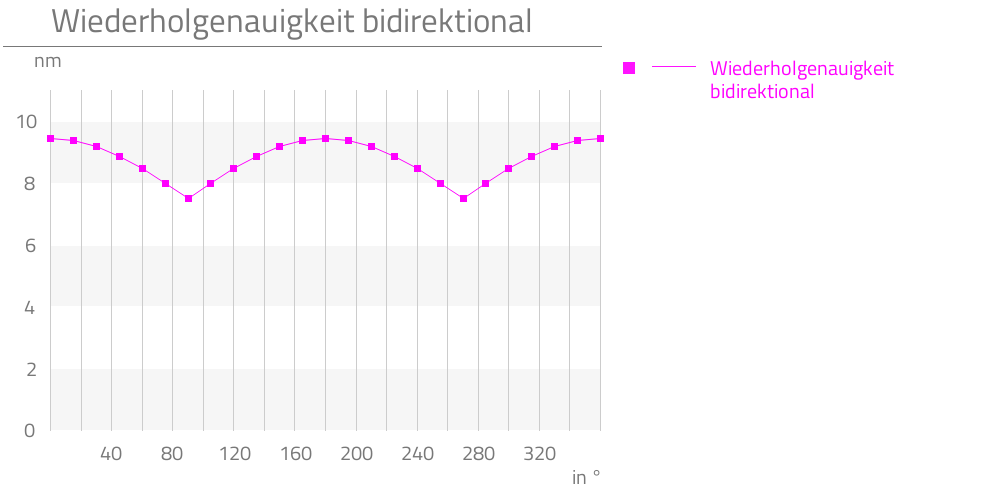
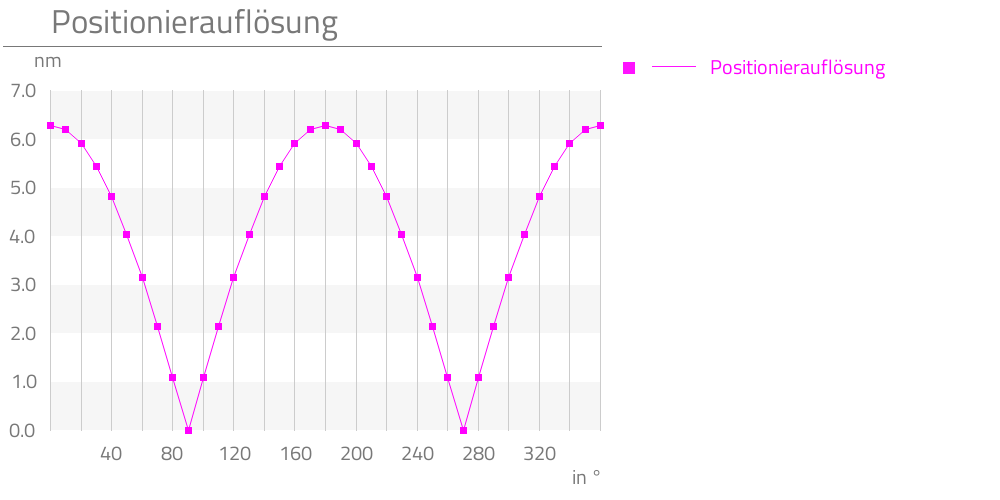
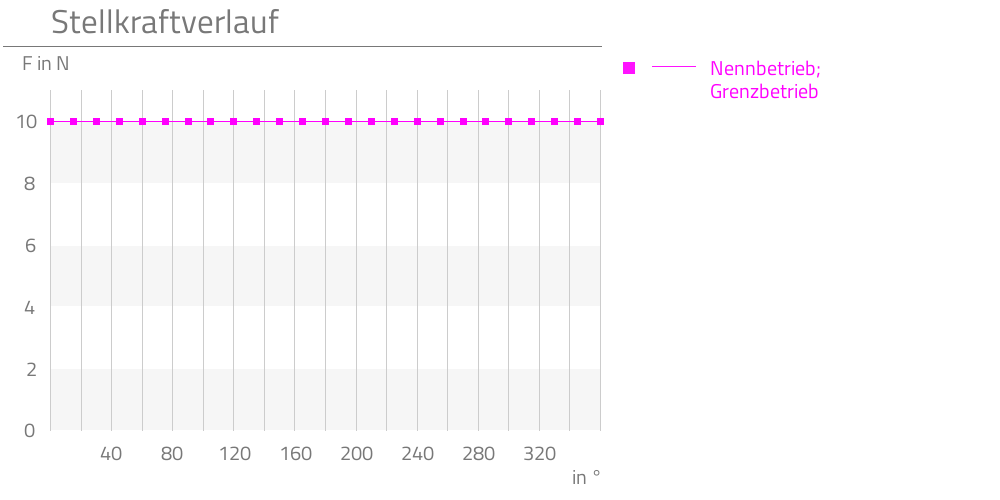
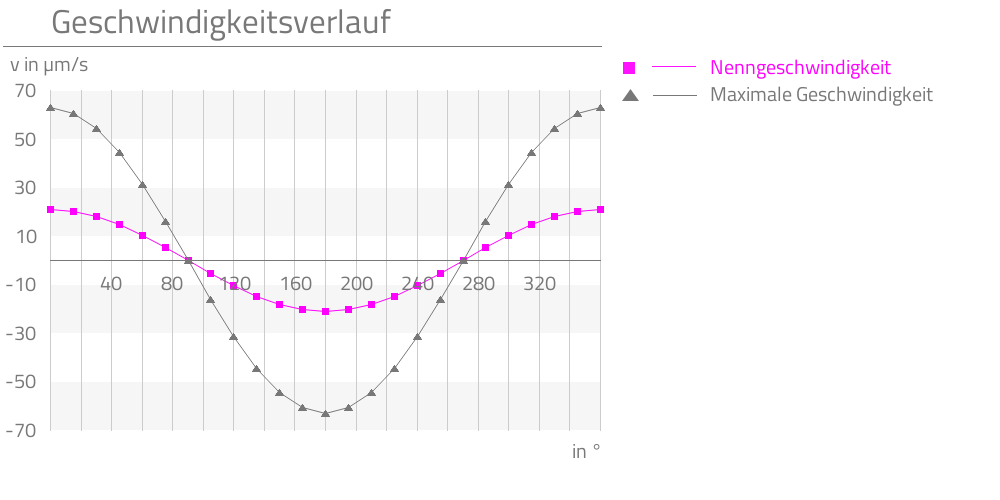
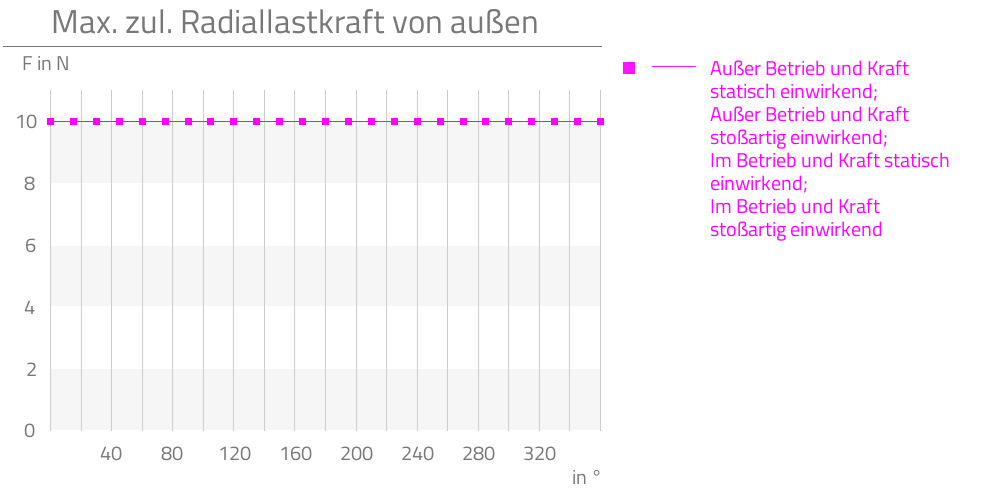
Grafiken
P-005
P-008
P-009
P-012
P-016
P-502
P-512
Alternative Produkte