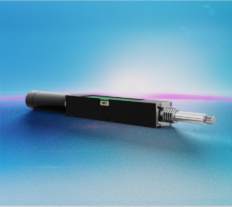
RasuunDrive® HighAcc 10mm – Type 1
Das Mikrolinearverstellersystem RasuunDrive® HighAcc 10mm – Type 1 ist eine kundenspezifische Ausführung und besitzt 3 mm Verstellweg.
Angetrieben wird das System von einem DC-Motor mit 12V Nennspannung. Zur Positionsbestimmung wird ein optischer Linearencoder mit einer Auflösungung von 0,5 µm eingesetzt.
Das federnd vorgespannte Spindelmuttersystem besitzt eine Steigung von 0.25 mm.
Die Befestigung des Mikrolinearverstellersystem bzw. der Anwendung ist ebenfalls kundenspezifisch konfiguriert.

Vorteile
1) Hohe Wiederholgenauigkeit
2) Extrem kompakte Bauform
3) Extreme Dynamik
4) Anwendungsspezifischer Tool Holder
5) Integrierter Linsenhalter
Technische Parameter
Die ausgewiesenen Werte basieren auf Berechnungen und Messverfahren der Micromotion
GmbH, die nach dem aktuellen Stand der Technik durchgeführt werden. Unsere Definitionen
finden Sie unter www.micromotion-drives.com. Für weitergehende Informationen
kontaktieren Sie bitte sales@micromotion.de.
Nr.
Parameter
Formelzeichen
Wert
Eigenschaften
P-004
Selbsthemmung
ja
P-005
Stellweg
s
3 mm
P-008
Wiederholgenauigkeit unidirektional
1 μm
P-009
Wiederholgenauigkeit bidirektional
5 μm
P-010
Positioniergenauigkeit
8 μm
P-012
Positionierauflösung
250000000000 μm
P-014
Lost motion
5 μm
P-015
Umkehrspiel
0 μm
P-016
Nennlastkraft
F
2.10966 N
P-017
Spitzenlastkraft
F
3.37546 N
P-018
Kollisionslastkraft
F
4.21933 N
P-023
Nenngeschwindigkeit
v
29.1667 mm/s
P-024
Grenzgeschwindigkeit
v
58.3333 mm/s
P-055
Massenträgheitsmoment
I
1171 * 10-4 gcm2
P-056
Gewicht
m
40 g
P-057
Min. zul. Umgebungstemperatur (außer Betrieb)
T
-20 °C
P-058
Min. zul. Umgebungstemperatur (im Betrieb)
T
-20 °C
P-059
Max. zul. Umgebungstemperatur (außer Betrieb)
T
85 °C
P-060
Max- zul. Umgebungstemperatur (im Betrieb)
T
65 °C
Motordaten: DC-Motor RE 10 12V 1.5W
P-100
Motorbauart
DC
P-102
Grenzdrehzahl des Motors
n
14000 min-1
P-104
Drehzahlkonstante des Motors
Kn
1060 min-1/V
P-106
Anhaltemoment des Motors
T
3.24 mNm
P-107
Drehmomentkonstante des Motors
Km
9 mNm/A
P-108
Leerlaufstrom des Motors
I
5.5 mA
P-110
Max. Dauerstrom des Motors
I
176 mA
P-111
Nennspannung des Motors
U
12 V
P-112
Phasenwiderstand des Motors
R
33.3 Ohm
P-113
Induktivität des Motors
L
0.299 mH
P-114
Amplitude Gegen-EMK des Motors
U
0.943 mV/rpm
P-118
Max. zulässige Wicklungstemperatur des Motors
T
85 °C
P-119
Wärmewiderstand des Motors zwischen Wicklung und Gehäuse
Rth1
9 K/W
P-120
Wärmewiderstand des Motors zwischen Gehäuse und Umgebungsluft
Rth2
37.5 K/W
P-121
Thermische Zeitkonstante der Motorwicklung
τw1
2220 ms
P-122
Thermische Zeitkonstante des Motorgehäuses
τw2
135000 ms
Encoderdaten
P-202
Kanäle des Encoders
A, A-, B, B-, I, I-
P-203
Frequenzbereich des Encoders
f
20000 kHz
P-204
Betriebsspannung des Encoders
U
5 ±0.5 V
P-205
Nennstromaufnahme des Encoders
I
150 mA
Daten Endlagenschalter
P-302
Konfiguration Endlagenschalter
n.c.
Spindeldaten: Spindeleinheit MLP-10-SPM0014 – 1.5mm Verstellweg
P-402
Steigung
R
0.25 mm
Material Informationen
P-900
RoHS-konform
ja
P-905
Schmierstoff bei Spindel-Mutter-System
Fomblin GRM60
P-911
Material Motorlagerung
Sintered bronze
P-914
Material Motorgehäuse
steel, coating layer removed and covered with protective foil
P-917
Material der Spindel
1.4034 DIN EN
Grafiken
P-019

Alternative Produkte