Eigenschaften
x
P-001:HV bzw. Hochvakuum entspricht einem Druckbereich von 10E-3 bis 10E-7mbar. UHV bzw. Ultrahochvakuum entspricht einem Druckbereich von 10E-7 bis 10E-12mbar. Die Vakuumtauglichkeit wird durch die verwendeten Materialien sowie Schmierstoffe beeinflusst. Zusätzlich darf die Konstruktion keine Kavitäten oder Einschlüsse besitzen. Ebenso ist die erzielbare Vakuumqualität abhängig von der Ausführung des Motors.
Vakuumtauglich
HV
x
P-003:Die Untersetzung beschreibt das Verhältnis zwischen antriebsseitiger Bewegung zu abtriebsseitiger Bewegung. Bei einer Untersetzung ist die abtriebsseitige Bewegung kleiner als die antriebsseitige Bewegung.
Untersetzung
i
500 : 1
x
P-004:Bei Selbsthemmung sind die durch Reibung verursachten Kräfte aufgrund der geometrischen Verhältnisse der Gleitpartner immer größer als die eingeleiteten Verstellkräfte. Aufgrund der geometrischen Verhältnisse kann der Gleitpartner in dem die Kraft eingeleitet wird nicht gegenüber dem Gleitpartner auf den die Verstellkraft einwirkt bewegt werden.
Selbsthemmung
ja
x
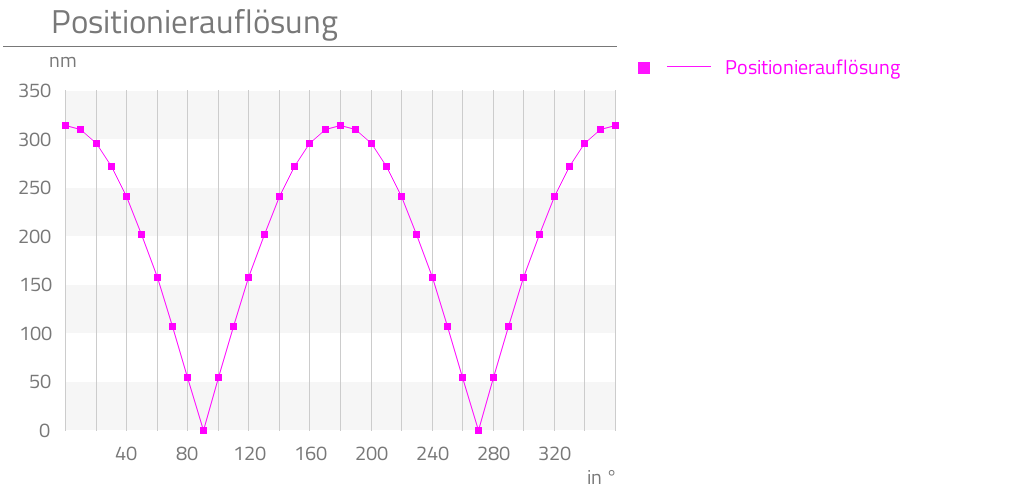
P-005:Beschreibt den für die Anwendung zur Verfügung stehenden Stellweg.
Max. Stellweg
s
1000 μm
x
P-014:Aus dem Verlauf der Hysteresekurve eines Getriebes kann der Wert für die Lost Motion ermittelt werden. Als Lost Motion ist die Winkeldifferenz definiert, bei dem die beiden Äste der Hysteresekurve ihren Drehmoment-Nulldurchgang haben, d.h. keine Drehmomentbelastung wirkt. Die Hysteresekurve wird ermittelt indem der Abtrieb bei blockierten Antrieb mit einem rechtsdrehendem und linksdrehendem Drehmoment belastet wird und die zugehörige Winkelverdrehung gemessen wird.
Lost motion
4.3755 μm
x
P-015:Aus dem Verlauf der Hysteresekurve eines Getriebes oder eines mechanisch Übertragungssystem kann das Umkehrspiel ermittelt werden. Als Umkehrspiel ist der Bereich definiert, bei dem der Verlauf der Hysteresekurve senkrecht ist, d.h. eine Winkelveränderung bzw. Positionsänderung ohne Veränderung des Drehmoment bzw. Kraft auftritt. Die Hysteresekurve wird ermittelt indem der Abtrieb bei blockierten Antrieb mit einem rechtsdrehendem und linksdrehendem Drehmoment bzw. Kraft belastet wird und die zugehörige Winkelverdrehung gemessen wird.
Umkehrspiel
0 μm
x
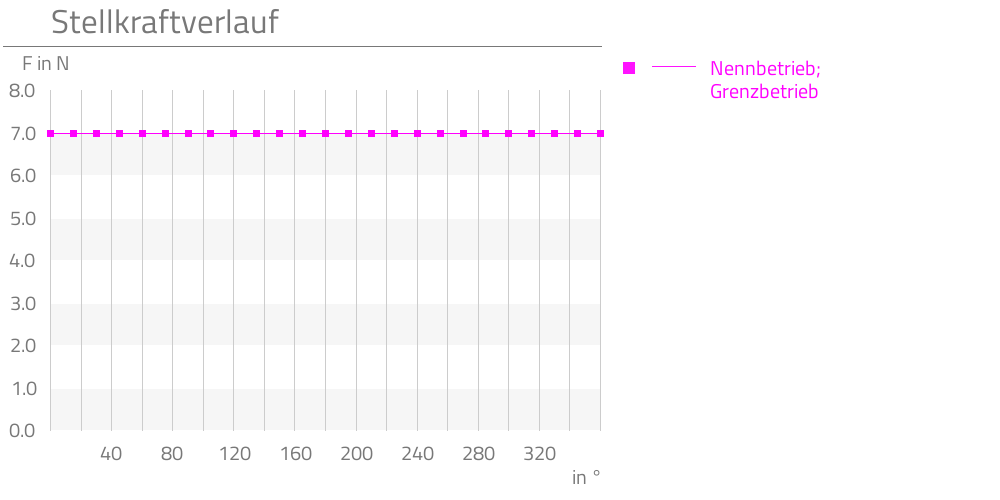
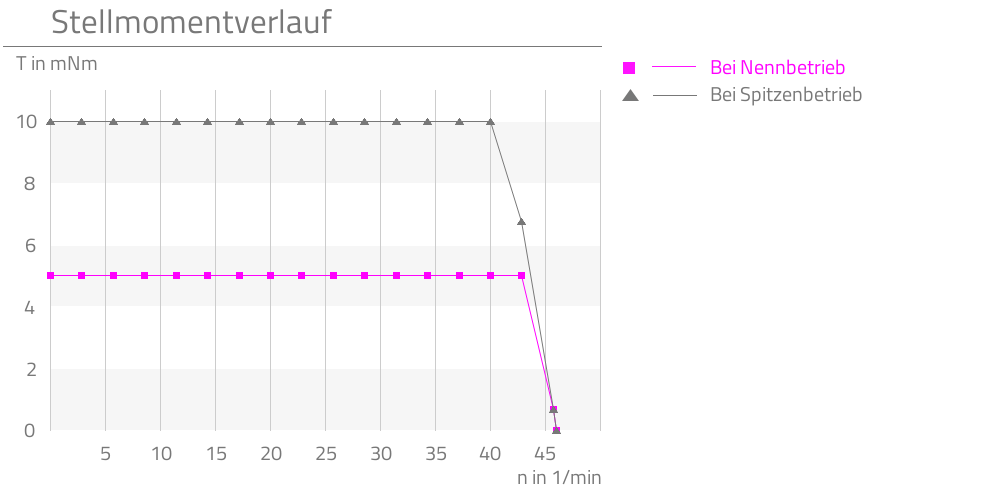
P-016:Als Nennlastmoment bzw. Nennlastkraft ist das Drehmoment bzw. Kraft definiert, bei welchem unter Nennbedingungen, d.h. Nenndrehzahl die Lebensdauer erreicht wird. Bei Antriebssystemen ist gegebenfalls das Motordrehmoment nicht ausreichend, um das Verlustdrehmoment des Gesamtsystems bei Nennbedingungen aufzubringen.
Nennlastkraft
F
8 N
x
P-017:Beim Spitzenlastmoment ist die
Belastung der Zähne noch unterhalb der Dauerschwingfestigkeit. Allerdings ergibt sich ein
erhöhter Verschleiß der Zahnflanken, was zu einer Reduzierung der Lebensdauer führt. Bei Antriebssystemen ist gegebenfalls das Motordrehmoment nicht ausreichend, um das Verlustdrehmoment des Gesamtsystems bei Spitzenlastmoment aufzubringen.
Spitzenlastkraft
F
24 N
x
P-018:Das Kollisionslastdrehmoment oder die Kollisionslastkraft beschreibt das maximal zulässige Drehmoment bzw. Kraft, die auf den Antrieb einwirken darf. Bei Überschreitung des Kollisionslastdrehmoment bzw. der Kollisionslastkraft ist eine Beschädigung bzw. reduzierte Lebensdauer des Antriebs nicht ausgeschlossen. Das Kollisionslastdrehmoment bzw. die Kollisionslastkraft sollte nur im Notfall erreicht werden. Bei Kollisionslastdrehmoment bzw. Kollisionslastkraft sind die elastischen Verformungen der Zähne noch so klein, dass keine Zahneingriffsstörungen auftreten und die Funktion gegeben ist. Allerdings sind die Belastungen über der Grenze der Dauerschwingfestigkeit, so dass die Anzahl an Belastungen minnimiert werden sollte. Bei einmaligem Eintreten kommt es noch nicht zum Bruch oder Ausfall. Bei Antriebssystemen ist gegebenfalls das Motordrehmoment nicht ausreichend, um ausreichend Drehmoment zu erzeugen, um das Kollisionslastdrehmoment bzw. die Kollisionslastkraft zu erreichen. Andererseits kann bei Antriebssystemen das verfügbare Motordrehmoment so hoch sein, dass durch den Antrieb das zulässige Kollisionslastdrehmoment bzw. die Kollisionslastkraft überschritten werden kann und der Antrieb dadurch beschädigt wird.
Kollisionslastkraft
F
32 N
x
P-035:Aus dem Verlauf der Hysteresekurve eines Getriebes oder eines mechanisch Übertragungssystem kann das Umkehrspiel ermittelt werden. Als Umkehrspiel ist der Bereich definiert, bei dem der Verlauf der Hysteresekurve senkrecht ist, d.h. eine Winkelveränderung bzw. Positionsänderung ohne Veränderung des Drehmoment bzw. Kraft auftritt. Die Hysteresekurve wird ermittelt indem der Abtrieb bei blockierten Antrieb mit einem rechtsdrehendem und linksdrehendem Drehmoment bzw. Kraft belastet wird und die zugehörige Winkelverdrehung gemessen wird.
Abtrieb Radialspiel
0 μm
x
P-036:Aus dem Verlauf der Hysteresekurve eines Getriebes oder eines mechanisch Übertragungssystem kann das Umkehrspiel ermittelt werden. Als Umkehrspiel ist der Bereich definiert, bei dem der Verlauf der Hysteresekurve senkrecht ist, d.h. eine Winkelveränderung bzw. Positionsänderung ohne Veränderung des Drehmoment bzw. Kraft auftritt. Die Hysteresekurve wird ermittelt indem der Abtrieb bei blockierten Antrieb mit einem rechtsdrehendem und linksdrehendem Drehmoment bzw. Kraft belastet wird und die zugehörige Winkelverdrehung gemessen wird.
Abtrieb Axialspiel
0 μm
x
P-037:Steifigkeit der Lagerung in radialer Richtung, d.h. elastische Auslenkung der gelagerten Welle in radialer Richtung in Abhängigkeit von der wirkenden Kraft.
Radialsteifigkeit
c
2.3 N/μm
x
P-038:Steifigkeit der Lagerung in axialer Richtung, d.h. elastische Auslenkung der gelagerten Welle in axialer Richtung in Abhängigkeit von der wirkenden Kraft.
Axialsteifigkeit
c
40 N/μm
x
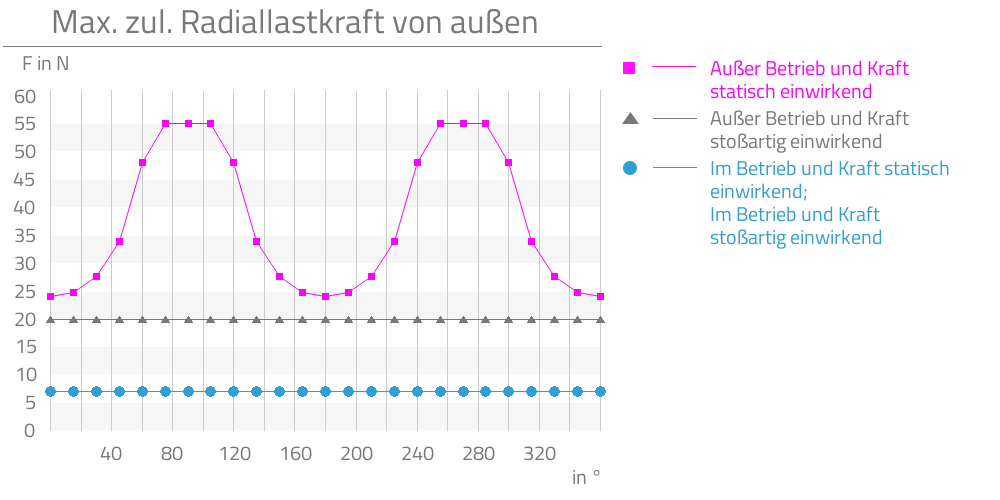
P-039:Beschreibt die maximal zulässige radiale Last auf die Abtriebswelle, wobei der Antrieb außer Betrieb ist, d.h. stillsteht, und die Kraft konstant einwirkt. Für die Bestimmung ist die statische Belastbarkeit der Kugellager Co sowie die geometrischen Verhältnisse vom Punkt der Krafteinleitung und des Lagerabstandes entscheidend. Für die zulässige Kraft wird als Punkt der Krafteinleitung der ungünstigste Fall angenommen, d.h. der maximale Abstand zwischen Kugellager und Ende der Abtriebswelle.
Max. zul. radiale Last auf Abtriebswelle (außer Betrieb, Kraft konstant einwirkend)
F
55 N
x
P-040:Beschreibt die maximal zulässige radiale Last auf die Abtriebswelle, wobei der Antrieb außer Betrieb ist, d.h. stillsteht, und die Kraft stoßartig einwirkt. Für die Bestimmung ist die Belastbarkeit der Kugellager entscheidend. Bei stoßartiger Belastung reduziert sich die zulässige Lagerbelastbarkeit auf ein dritttel von Co.
Max. zul. radiale Last auf Abtriebswelle (außer Betrieb, Kraft stoßartig einwirkend)
F
20 N
x
P-041:Beschreibt die maximal zulässige radiale Last auf die Abtriebswelle, wobei der Antrieb im Betrieb ist und die Kraft konstant einwirkt. Für die Bestimmung der zulässigen Kraft im dynamischen Fall ist neben der Belastbarkeit der Kugellager insbesondere die Steifigkeit der Lagerung entscheidend und der durch die elastische Verformung entstehende Rundlauffehler am Dynamic Spline. Für die zulässige Kraft wird als Punkt der Krafteinleitung der ungünstigste Fall angenommen, d.h. der maximale Abstand zwischen Kugellager und Ende der Abtriebswelle.
Max. zul. radiale Last auf Abtriebswelle (im Betrieb, Kraft konstant einwirkend)
F
7 N
x
P-042:Beschreibt die maximal zulässige radiale Last auf die Abtriebswelle, wobei der Antrieb im Betrieb ist, d.h. sich dreht, und die Kraft stoßartig einwirkt. Bei stoßartiger Belastung reduziert sich die zulässige dynamische Lagerbelastbarkeit der Kugellager auf ein dritttel von Cr. Für die Bestimmung ist neben der Belastbarkeit der Kugellager ebenfalls die elastische Verformung der Abtriebswelle im Bereich des Dynamic Spline und der damit verbundene Rundlauffehler aufgrund der Steifigkeit der Lagerung entscheidend.
Max. zul. radiale Last auf Abtriebswelle (im Betrieb, Kraft stoßartig einwirkend)
F
7 N
x
P-043:Beschreibt die maximal zulässige axiale Last auf die Abtriebswelle, wobei der Antrieb außer Betrieb ist, d.h. stillsteht, und die Kraft konstant einwirkt. Für die Bestimmung ist die statische Belastbarkeit der Kugellager sowie die elastische Verformung der Abtriebswelle aufgrund der Steifigkeit der Abtriebslagerung und die damit verbundene Position des Dynamic Splines entscheidend.
Max. zul. axiale Last auf Abtriebswelle (außer Betrieb, Kraft konstant einwirkend)
F
150 N
x
P-044:Beschreibt die maximal zulässige axiale Last auf die Abtriebswelle, wobei der Antrieb außer Betrieb ist, d.h. stillsteht, und die Kraft stoßartig einwirkt. Für die Bestimmung ist die statische Belastbarkeit der Kugellager, welche im stoßartigen Fall nur ein drittel von Co entspricht, sowie die elastische Verformung der Abtriebswelle aufgrund der Steifigkeit der Abtriebslagerung und die damit verbundene Position des Dynamic Splines entscheidend.
Max. zul. axiale Last auf Abtriebswelle (außer Betrieb, Kraft stoßartig einwirkend)
F
50 N
x
P-045:Beschreibt die maximal zulässige axiale Last auf die Abtriebswelle, wobei der Antrieb im Betrieb ist, d.h. sich dreht, und die Kraft konstant einwirkt. Für die Bestimmung ist die dynamische Belastbarkeit der Kugellager sowie die elastische Verformung der Abtriebswelle aufgrund der Steifigkeit der Abtriebslagerung und die damit verbundene Position des Dynamic Splines entscheidend.
Max. zul. axiale Last auf Abtriebswelle (im Betrieb, Kraft konstant einwirkend)
F
380 N
x
P-046:Beschreibt die maximal zulässige axiale Last auf die Abtriebswelle, wobei der Antrieb im Betrieb ist, d.h. sich dreht, und die Kraft stoßartig einwirkt. Für die Bestimmung ist die dynamische Belastbarkeit der Kugellager, welche im stoßartigen Fall nur ein drittel von Cr entspricht, sowie die elastische Verformung der Abtriebswelle aufgrund der Steifigkeit der Abtriebslagerung und die damit verbundene Positionsänderung des Dynamic Splines entscheidend.
Max. zul. axiale Last auf Abtriebswelle (im Betrieb, Kraft stoßartig einwirkend)
F
127 N
x
P-055:Das Massenträgheitsmoment gibt den Widerstand eines Körpers gegenüber einer Änderung seiner Rotationsbewegung an.
Massenträgheitsmoment
I
922 * 10-4 gcm2
Motordaten: Schrittmotor AM 1020-2R-A-0.25-8-10/1977
x
P-102:Die Grenzdrehzahl des Motors beschreibt die Drehzahl, bevor mechanische Schäden am Kommutator, dme Rotor oder der Lagerung auftreten.
Grenzdrehzahl des Motors
n
21000 min-1
x
P-103:Beschreibt die Schrittfrequenz, bei der beim unbelasteten Motor der Rotor in Resonanzschwingung geraten kann. Es wird empfohlen diesen Frequenzbereich im normalen Betrieb zu vermeiden und den Motor in einer höheren Frequenz zu starten oder Halb- oder Mikroschritte einzusetzen. Zusätzliche träge Massen, wie z.B. durch ein Getriebe reduzieren die Resonanzfrequenz.
Resonanzfrequenz des Motors (bei Nennstrom)
f
140 Hz
x
P-105:Beschreibt das Drehmoment, welches der Motor im Stillstand entwickelt.
Haltemoment des Motors (stromlos)
T
0.2 mNm
x
P-109:Der Phasenstrom, der durch beide Phasenwicklungen fließen darf, ohne dass der Motor bei einer Umgebungstemperatur von 20°C und konstantem Betrieb überhitzt.
Nennstrom des Motors
I
250 mA
x
P-111:Die Nennspannung entspricht der Spannung, bei der alle anderen Nennkennwerte, insbesondere der Nennstrom bei 20°C, des Motors einstellen, gemessen und klassifiziert werden.
Nennspannung des Motors
U
2 V
x
P-112:Der Phasenwiderstand beschreibt den ohmschen Widerstand der Wicklung einer Phase bei einer Umgebungstemperatur von 20°C im eingeschwungenen Zustand.
Phasenwiderstand des Motors
R
8 Ohm
x
P-113:Beschreibt die Induktivität der Wicklung einer Phase bei einer Umgebungstemperatur gemessen bei 1 kHz.
Induktivität des Motors
L
2.4 mH
x
P-114:Beschreibt die Amplitude der Gegen-EMK.
Amplitude Gegen-EMK des Motors
U
0.6 mV/rpm
x
P-115:Der Vollschrittwinkel des Motors beschreibt den Winkel, um welchen sich der Rotor dreht, wenn um eine Phase weitergeschaltet wird.
Vollschrittwinkel des Motors
18 °
x
P-116:Die Schrittwinkelgenauigkeit beschreibt die Abweichung der Ist-Rotorposition von der idealen Sollrotorposition, wobei keine äußere Last einwirkt.
Schrittwinkelgenauigkeit des Motors
±1.8 °
x
P-117:Die elektrische Zeitkonstante beschreibt die Dauer um 67% des möglichen Phasenstromes eines vorgegebenen Arbeitspunktes zu erreichen.
Elektrische Zeitkonstante des Motors
t
0.32 ms
x
P-118:Die Temperatur, welche in der Wicklung maximal entstehen darf ohne den Magneten oder die Wicklung zu zerstören. Die Wicklungstemperatur kann durch Messung der Widerstandsänderung und dem vom Spulendrahtmaterial abhängigen Temperaturkoeffizienten alpha berechnet werden. T1 = 1/alpha * (R1/R0 + alpha*T0 – 1)
Max. zulässige Wicklungstemperatur des Motors
T
130 °C
x
P-119:Beschreibt den Wärmewiderstand des Motors zwischen Wicklung und Gehäuse.
Wärmewiderstand des Motors zwischen Wicklung und Gehäuse
Rth1
3.9 K/W
x
P-120:Beschreibt den Wärmewiderstand des Motors zwischen Gehäuse und Umgebungsluft.
Wärmewiderstand des Motors zwischen Gehäuse und Umgebungsluft
Rth2
53.8 K/W
x
P-121:Beschreibt die thermische Zeitkonstante der Wicklung des Motors.
Thermische Zeitkonstante der Motorwicklung
τw1
3200 ms
x
P-122:Beschreibt die thermische Zeitkonstante des Gehäuses des Motors.
Thermische Zeitkonstante des Motorgehäuses
τw2
200000 ms
x
P-123:Beschreibt die Isolations- und Prüfspannung des Motors.
Isolations- und Prüfspannung des Motors
U
200 V
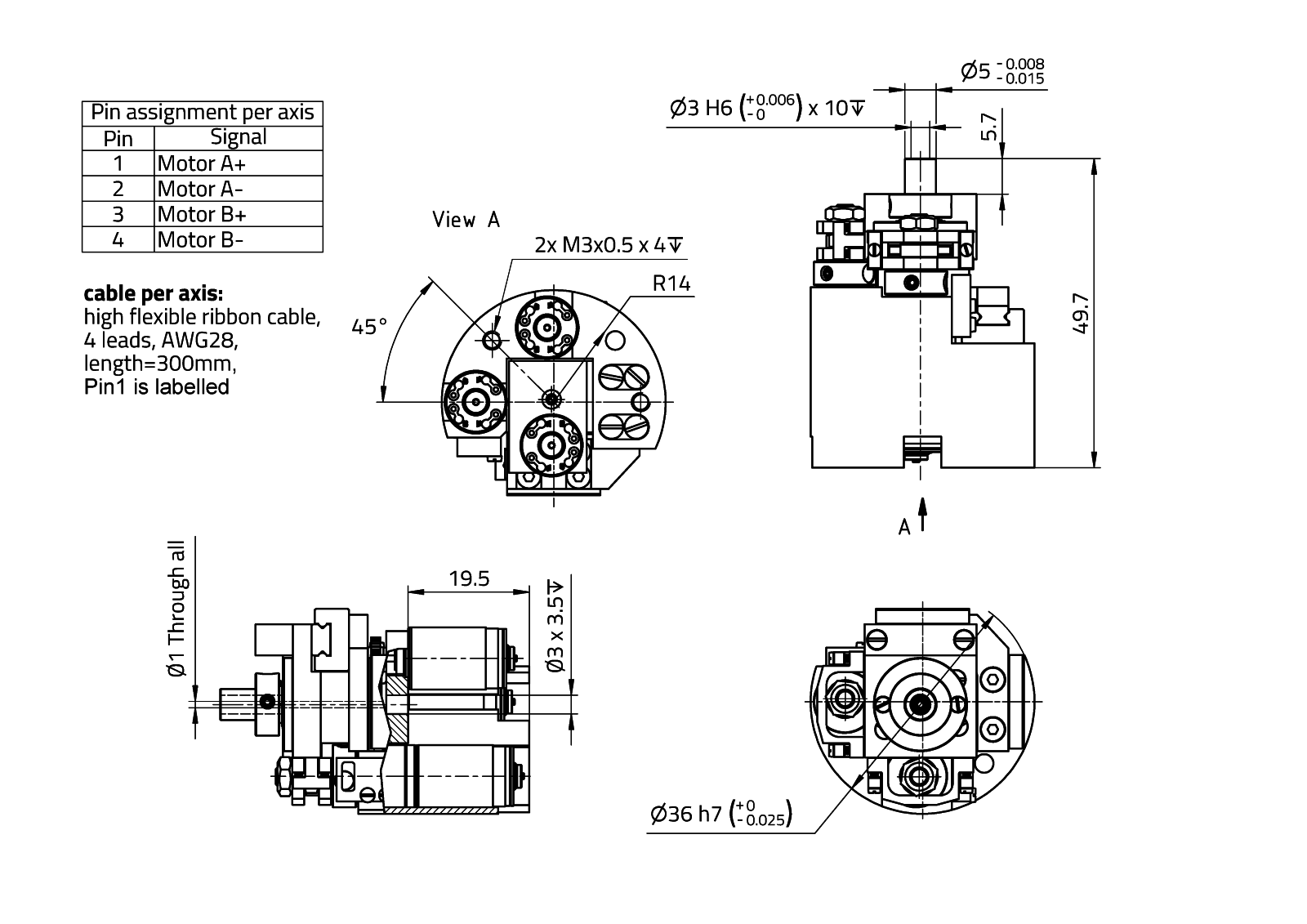
Daten Endlagenschalter
Konfiguration Endlagenschalter
n.o.
Exzenterdaten
x
P-501:Die Exzentrizität ist der Distanz der Drehachse der Abtriebswelle zur Achse des Exzenters.
Exzentrizität
500 μm
Max. zul. radiale Last auf Exzenterlager (außer Betrieb, Kraft konstant einwirkend)
F
24 N
Max. zul. radiale Last auf Exzenterlager (außer Betrieb, Kraft stoßartig einwirkend)
F
20 N
x
P-506:Bei diesem Wert wird der Kraftansatzpunkt beim Excenter gesehen. Durch die Excentrizität entsteht aufgrund der Hebelwirkung und der radialen Kraft auch ein Drehmoment auf das Getriebe. Somit wird bei diesem Wert gleichzeitig die Drehmomentbelastbarkeit des Getriebes als auch die Belastbarkeit der Lagerung berücksichtigt. Übersteigt das resultierende Drehmoment das Spitzenlastmoment des Getriebeeinbausatzes ist der Getriebeeinbausatz das begrenzende Element. Anderenfalls die Lagerung.
Max. zul. radiale Last auf Exzenterlager (im Betrieb, Kraft konstant einwirkend)
F
7 N
Max. zul. radiale Last auf Exzenterlager (im Betrieb, Kraft stoßartig einwirkend)
F
7 N
Max. zul. axiale Last auf Exzenterlager (außer Betrieb, Kraft konstant einwirkend)
F
150 N
Max. zul. axiale Last auf Exzenterlager (außer Betrieb, Kraft stoßartig einwirkend)
F
50 N
Max. zul. axiale Last auf Exzenterlager (im Betrieb, Kraft konstant einwirkend)
F
380 N
Max. zul. axiale Last auf Exzenterlager (im Betrieb, Kraft stoßartig einwirkend)
F
127 N
Exzentrizitätsfehler
20 μm
Linearlagerdaten
Führungsbauart
Micro frictionless table type NDN
Max. zul. Querkraft in y-Richtung (außer Betrieb, Kraft konstant einwirkend)
F
50 N
Max. zul. Querkraft in y-Richtung (außer Betrieb, Kraft stoßartig einwirkend)
F
50 N
Max. zul. Querkraft in y-Richtung (im Betrieb, Kraft konstant einwirkend)
F
50 N
Max. zul. Querkraft in y-Richtung (im Betrieb, Kraft stoßartig einwirkend)
F
50 N
Max. zul. Querkraft in z-Richtung (außer Betrieb, Kraft konstant einwirkend)
F
50 N
Max. zul. Querkraft in z-Richtung (außer Betrieb, Kraft stoßartig einwirkend)
F
50 N
Max. zul. Querkraft in z-Richtung (im Betrieb, Kraft konstant einwirkend)
F
50 N
Max. zul. Querkraft in z-Richtung (im Betrieb, Kraft stoßartig einwirkend)
F
50 N
Max. zul. Kippmoment um y-Achse (außer Betrieb, Kraft konstant einwirkend)
T
90 mNm
Max. zul. Kippmoment um y-Achse (außer Betrieb, Kraft stoßartig einwirkend)
T
90 mNm
Max. zul. Kippmoment um y-Achse (im Betrieb, Kraft konstant einwirkend)
T
90 mNm
Max. zul. Kippmoment um y-Achse (im Betrieb, Kraft stoßartig einwirkend)
T
90 mNm
Max. zul. Kippmoment um z-Achse (außer Betrieb, Kraft konstant einwirkend)
T
140 mNm
Max. zul. Kippmoment um z-Achse (außer Betrieb, Kraft stoßartig einwirkend)
T
140 mNm
Max. zul. Kippmoment um z-Achse (im Betrieb, Kraft konstant einwirkend)
T
140 mNm
Max. zul. Kippmoment um z-Achse (im Betrieb, Kraft stoßartig einwirkend)
T
140 mNm
Steifigkeit in y-Richtung
c
10 N/μm
Steifigkeit in z-Richtung
c
10 N/μm
Führungsspiel in y-Richtung
Zero backlash/ preloaded μm
Führungsspiel in z-Richtung
Zero backlash/ preloaded μm
Material Informationen