CoograDrive® HighVac 10mm – Type 2
Der Mikroantrieb CoograDrive® HighVac 10mm – Type 2 kombiniert besondere Robustheit mit Zuverlässigkeit und extrem geringer Baulänge.
Angetrieben wird das Mikropositioniersystem von einem Schrittmotor mit 20 Schritten pro Umdrehung im offenen Regelkreis.
Es ist die ideale Lösung für Anwendungen in extremen Umgebungsbedingungen und engen Platzverhältnissen. Da als Schmierstoff für die Kugellager ebenso wie für den Getriebeeinbausatz Braycote verwendet wird, kann es im Hochvakuum eingesetzt werden. Die Abtriebswelle werden durch vorgespannte Kugellager präzise geführt und ermöglichen dadurch ein direktes Anbinden der Anwendung. Im Kern des Mikroantriebes findet sich ein spielarmes CoograDrive® Getriebe mit einer Untersetzung von 80:1.
Vorteile
1) Extrem kompakte Bauform
2) Vakuumschmierstoff
3) Einsatz hochwertiger Materialien
4) Vorgespannte Kugellagerung
5) Drehmoment optimierte Untersetzung
Technische Parameter
Die ausgewiesenen Werte basieren auf Berechnungen und Messverfahren der Micromotion
GmbH, die nach dem aktuellen Stand der Technik durchgeführt werden. Unsere Definitionen
finden Sie unter www.micromotion-drives.com. Für weitergehende Informationen
kontaktieren Sie bitte sales@micromotion.de.
Nr.
Parameter
Formelzeichen
Wert
Eigenschaften
P-001
Vakuumtauglich
HV
P-003
Untersetzung
i
80 : 1
P-004
Selbsthemmung
ja
P-008
Wiederholgenauigkeit unidirektional
5.85 arcmin
P-009
Wiederholgenauigkeit bidirektional
47.025 arcmin
P-010
Positioniergenauigkeit
32.7 arcmin
P-011
Übertragungsgenauigkeit
65.4 arcmin
P-012
Positionierauflösung
0.225 °
P-013
Verdrehsteifigkeit
3.80 Nm/rad
P-014
Lost motion
45 arcmin
P-015
Umkehrspiel
20 arcmin
P-016
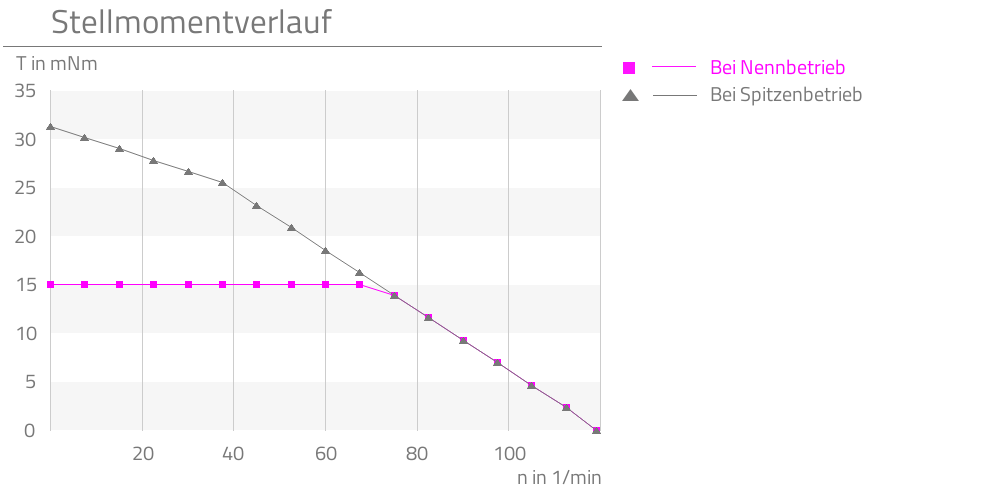
Nennlastmoment
T
15 mNm
P-017
Spitzenlastmoment
T
100 mNm
P-018
Kollisionslastmoment
T
120 mNm
P-021
Nennantriebsdrehzahl
n
10000 min-1
P-022
Grenzantriebsdrehzahl
n
21000 min-1
P-023
Nennabtriebsdrehzahl
n
125 min-1
P-024
Grenzabtriebsdrehzahl
n
262.5 min-1
P-026
Losbrechmoment
T
180 μNm
P-027
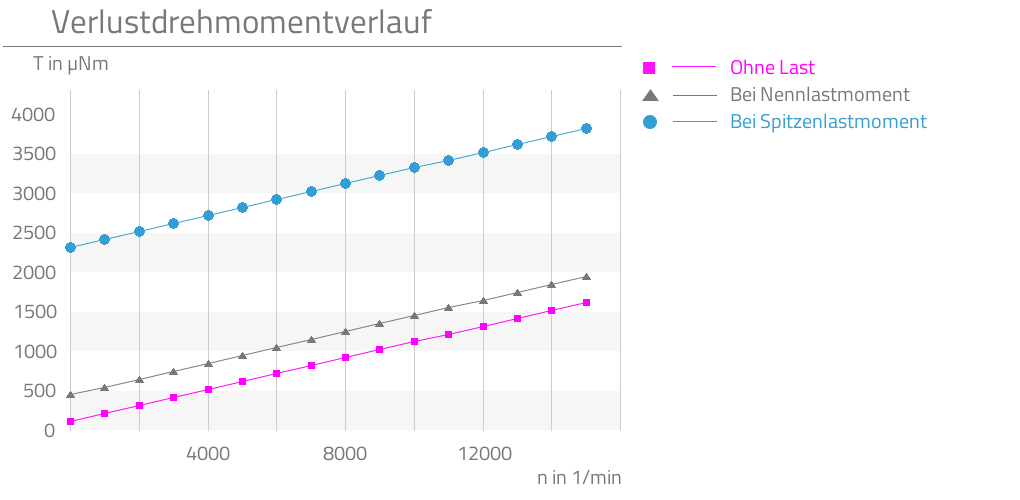
Verlustdrehmoment lastfrei
T
120 μNm
P-028
Verlustdrehmoment bei Nennbetrieb
T
1570 μNm
P-034
Lebensdauer bei Nennbetrieb
500 h
P-035
Abtrieb Radialspiel
0 μm
P-036
Abtrieb Axialspiel
0 μm
P-037
Radialsteifigkeit
c
2.3 N/μm
P-038
Axialsteifigkeit
c
40 N/μm
P-039
Max. zul. radiale Last auf Abtriebswelle (außer Betrieb, Kraft konstant einwirkend)
F
55 N
P-040
Max. zul. radiale Last auf Abtriebswelle (außer Betrieb, Kraft stoßartig einwirkend)
F
20 N
P-041
Max. zul. radiale Last auf Abtriebswelle (im Betrieb, Kraft konstant einwirkend)
F
7 N
P-042
Max. zul. radiale Last auf Abtriebswelle (im Betrieb, Kraft stoßartig einwirkend)
F
7 N
P-043
Max. zul. axiale Last auf Abtriebswelle (außer Betrieb, Kraft konstant einwirkend)
F
150 N
P-044
Max. zul. axiale Last auf Abtriebswelle (außer Betrieb, Kraft stoßartig einwirkend)
F
50 N
P-045
Max. zul. axiale Last auf Abtriebswelle (im Betrieb, Kraft konstant einwirkend)
F
380 N
P-046
Max. zul. axiale Last auf Abtriebswelle (im Betrieb, Kraft stoßartig einwirkend)
F
127 N
P-055
Massenträgheitsmoment
I
938.01 * 10-4 gcm2
P-057
Min. zul. Umgebungstemperatur (außer Betrieb)
T
-35 °C
P-058
Min. zul. Umgebungstemperatur (im Betrieb)
T
-10 °C
P-059
Max. zul. Umgebungstemperatur (außer Betrieb)
T
130 °C
P-060
Max- zul. Umgebungstemperatur (im Betrieb)
T
70 °C
Motordaten: Schrittmotor AM 1020-2R-A-0.25-8-10/1977
P-100
Motorbauart
Stepper
P-102
Grenzdrehzahl des Motors
n
21000 min-1
P-103
Resonanzfrequenz des Motors (bei Nennstrom)
f
140 Hz
P-105
Haltemoment des Motors (stromlos)
T
0.2 mNm
P-109
Nennstrom des Motors
I
250 mA
P-111
Nennspannung des Motors
U
2 V
P-112
Phasenwiderstand des Motors
R
8 Ohm
P-113
Induktivität des Motors
L
2.4 mH
P-114
Amplitude Gegen-EMK des Motors
U
0.6 mV/rpm
P-115
Vollschrittwinkel des Motors
18 °
P-116
Schrittwinkelgenauigkeit des Motors
±1.8 °
P-117
Elektrische Zeitkonstante des Motors
t
0.32 ms
P-118
Max. zulässige Wicklungstemperatur des Motors
T
130 °C
P-119
Wärmewiderstand des Motors zwischen Wicklung und Gehäuse
Rth1
3.9 K/W
P-120
Wärmewiderstand des Motors zwischen Gehäuse und Umgebungsluft
Rth2
53.8 K/W
P-121
Thermische Zeitkonstante der Motorwicklung
τw1
3200 ms
P-122
Thermische Zeitkonstante des Motorgehäuses
τw2
200000 ms
P-123
Isolations- und Prüfspannung des Motors
U
200 V
Material Informationen
P-900
RoHS-konform
ja
P-901
Schmierstoff Getriebeabtriebslagerung
Braycote601EF
P-903
Schmierstoff Getriebeeinbausatz
Braycote601EF
P-904
Schmierstoff Motorlagerung
Braycote601EF
P-908
Material Getriebeeinbausatz
NiFe
P-909
Material Getriebeabtriebslagerung
1.4108 DIN EN
P-911
Material Motorlagerung
Stainless steel
P-912
Material abtriebsseitiges Getriebegehäuse
1.4305 DIN EN
P-914
Material Motorgehäuse
Anodized aluminum
Grafiken
P-019
P-029
Alternative Produkte