Material Informationen
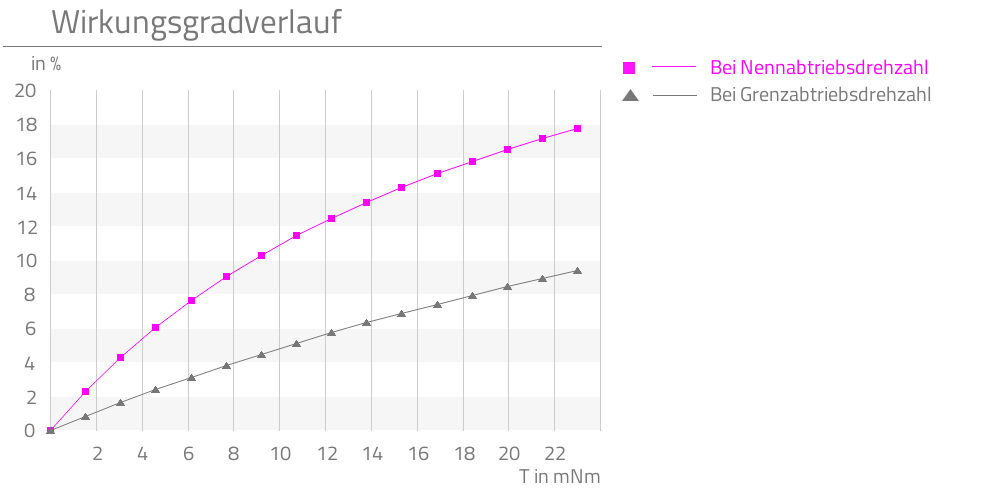
Motordaten: Schrittmotor AM 1020-2R-A-0.25-8-01-A1984
x
P-102:Die Grenzdrehzahl des Motors beschreibt die Drehzahl, bevor mechanische Schäden am Kommutator, dme Rotor oder der Lagerung auftreten.
Grenzdrehzahl des Motors
n
21000 min-1
x
P-103:Beschreibt die Schrittfrequenz, bei der beim unbelasteten Motor der Rotor in Resonanzschwingung geraten kann. Es wird empfohlen diesen Frequenzbereich im normalen Betrieb zu vermeiden und den Motor in einer höheren Frequenz zu starten oder Halb- oder Mikroschritte einzusetzen. Zusätzliche träge Massen, wie z.B. durch ein Getriebe reduzieren die Resonanzfrequenz.
Resonanzfrequenz des Motors (bei Nennstrom)
f
140 Hz
x
P-105:Beschreibt das Drehmoment, welches der Motor im Stillstand entwickelt.
Haltemoment des Motors (stromlos)
T
0.2 mNm
x
P-109:Der Phasenstrom, der durch beide Phasenwicklungen fließen darf, ohne dass der Motor bei einer Umgebungstemperatur von 20°C und konstantem Betrieb überhitzt.
Nennstrom des Motors
I
250 mA
x
P-111:Die Nennspannung entspricht der Spannung, bei der alle anderen Nennkennwerte, insbesondere der Nennstrom bei 20°C, des Motors einstellen, gemessen und klassifiziert werden.
Nennspannung des Motors
U
2 V
x
P-112:Der Phasenwiderstand beschreibt den ohmschen Widerstand der Wicklung einer Phase bei einer Umgebungstemperatur von 20°C im eingeschwungenen Zustand.
Phasenwiderstand des Motors
R
8.3 Ohm
x
P-113:Beschreibt die Induktivität der Wicklung einer Phase bei einer Umgebungstemperatur gemessen bei 1 kHz.
Induktivität des Motors
L
2.4 mH
x
P-114:Beschreibt die Amplitude der Gegen-EMK.
Amplitude Gegen-EMK des Motors
U
0.6 mV/rpm
x
P-115:Der Vollschrittwinkel des Motors beschreibt den Winkel, um welchen sich der Rotor dreht, wenn um eine Phase weitergeschaltet wird.
Vollschrittwinkel des Motors
18 °
x
P-116:Die Schrittwinkelgenauigkeit beschreibt die Abweichung der Ist-Rotorposition von der idealen Sollrotorposition, wobei keine äußere Last einwirkt.
Schrittwinkelgenauigkeit des Motors
±1.8 °
x
P-117:Die elektrische Zeitkonstante beschreibt die Dauer um 67% des möglichen Phasenstromes eines vorgegebenen Arbeitspunktes zu erreichen.
Elektrische Zeitkonstante des Motors
t
0.32 ms
x
P-118:Die Temperatur, welche in der Wicklung maximal entstehen darf ohne den Magneten oder die Wicklung zu zerstören. Die Wicklungstemperatur kann durch Messung der Widerstandsänderung und dem vom Spulendrahtmaterial abhängigen Temperaturkoeffizienten alpha berechnet werden. T1 = 1/alpha * (R1/R0 + alpha*T0 – 1)
Max. zulässige Wicklungstemperatur des Motors
T
130 °C
x
P-119:Beschreibt den Wärmewiderstand des Motors zwischen Wicklung und Gehäuse.
Wärmewiderstand des Motors zwischen Wicklung und Gehäuse
Rth1
3.9 K/W
x
P-120:Beschreibt den Wärmewiderstand des Motors zwischen Gehäuse und Umgebungsluft.
Wärmewiderstand des Motors zwischen Gehäuse und Umgebungsluft
Rth2
53.8 K/W
x
P-121:Beschreibt die thermische Zeitkonstante der Wicklung des Motors.
Thermische Zeitkonstante der Motorwicklung
τw1
3200 ms
x
P-122:Beschreibt die thermische Zeitkonstante des Gehäuses des Motors.
Thermische Zeitkonstante des Motorgehäuses
τw2
200000 ms
x
P-123:Beschreibt die Isolations- und Prüfspannung des Motors.
Isolations- und Prüfspannung des Motors
U
200 V
Material Informationen