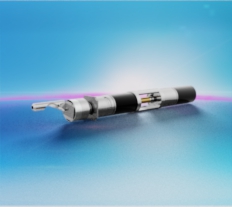
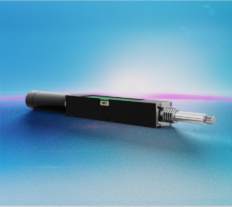
RasuunDrive® HighRange 10mm – Type 4
Das Mikropositioniersystem RasuunDrive® HighRange 10mm – Type 4 bietet 12 mm Verstellweg.
Das System wird von einem DC-Motor mit 12V Nennspannung und integriertem Encoder mit einer Auflösung von 256 Impulsen pro Umdrehung angetrieben.
Direkt mit dem Motor verbunden ist das Herzstück des Mikropositionierers, ein spielfreies MaalonDrive® Getriebe mit einer Untersetzung von 160:1.
Hieran schließt sich das federnd vorgespannte spielfreie Spindelmuttersystem mit einer Steigung von 0,4 mm an.
Eine vorgespannten Kugelführung lagert die lineare Bewegung.
Der Anschlussadapter für die Befestigung des Mikrolinearverstellersystem ist ein Zentrierbund mit einem Durchmesser von 9,5g6, die Ankopplung der Last erfolgt über ein Gewinde M3x3,5.

Vorteile
1) Flexibel integrierbar
2) Einfache Regelbarkeit
3) Integrierte Endlagenschalter
4) Zylinderflächenadapter
5) Spielfreiheit bei optimalem Fit zwischen Geschwindigkeit und Auflösung
Technische Parameter
Die ausgewiesenen Werte basieren auf Berechnungen und Messverfahren der Micromotion
GmbH, die nach dem aktuellen Stand der Technik durchgeführt werden. Unsere Definitionen
finden Sie unter www.micromotion-drives.com. Für weitergehende Informationen
kontaktieren Sie bitte sales@micromotion.de.
Nr.
Parameter
Formelzeichen
Wert
Eigenschaften
P-003
Untersetzung
i
160 : 1
P-004
Selbsthemmung
ja
P-005
Stellweg
s
12 mm
P-008
Wiederholgenauigkeit unidirektional
1 μm
P-009
Wiederholgenauigkeit bidirektional
5 μm
P-010
Positioniergenauigkeit
12 μm
P-012
Positionierauflösung
0.00977 μm
P-014
Lost motion
5 μm
P-015
Umkehrspiel
0 μm
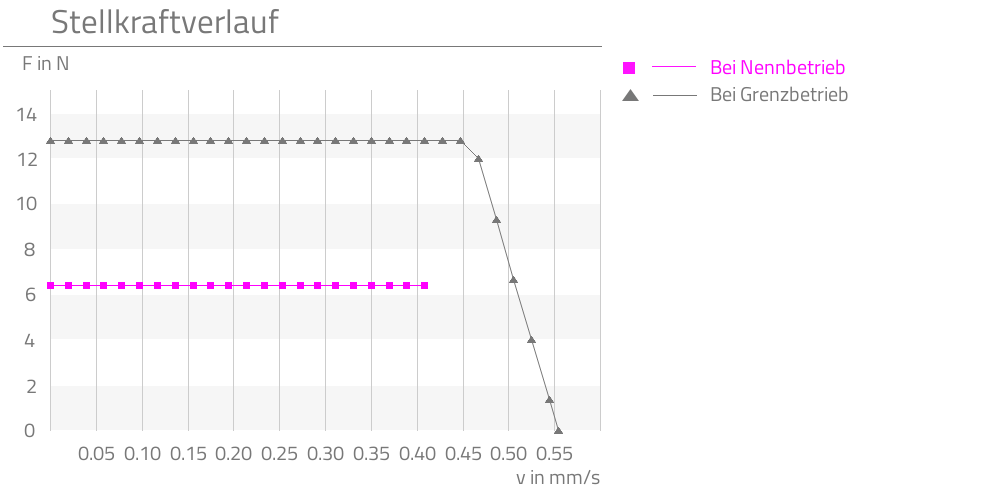
P-016
Nennlastkraft
F
6.40529 N
P-017
Spitzenlastkraft
F
12.8106 N
P-018
Kollisionslastkraft
F
29.4643 N
P-023
Nenngeschwindigkeit
v
0.41667 mm/s
P-024
Grenzgeschwindigkeit
v
0.58333 mm/s
P-034
Lebensdauer bei Nennbetrieb
500 h
P-035
Abtrieb Radialspiel
0 μm
P-036
Abtrieb Axialspiel
0 μm
P-044
Max. zul. axiale Last auf Abtriebswelle (außer Betrieb, Kraft stoßartig einwirkend)
F
50 N
P-055
Massenträgheitsmoment
I
727 * 10-4 gcm2
P-056
Gewicht
m
26 g
P-057
Min. zul. Umgebungstemperatur (außer Betrieb)
T
-20 °C
P-058
Min. zul. Umgebungstemperatur (im Betrieb)
T
-20 °C
P-059
Max. zul. Umgebungstemperatur (außer Betrieb)
T
85 °C
P-060
Max- zul. Umgebungstemperatur (im Betrieb)
T
65 °C
P-099
Weitere technische Daten
2 digital limit sensors integrated
Motordaten: DC-Motor RE 10 12V 0.75W
P-100
Motorbauart
DC
P-102
Grenzdrehzahl des Motors
n
14000 min-1
P-104
Drehzahlkonstante des Motors
Kn
1000 min-1/V
P-106
Anhaltemoment des Motors
T
1.01 mNm
P-107
Drehmomentkonstante des Motors
Km
9.55 mNm/A
P-108
Leerlaufstrom des Motors
I
5.37 mA
P-110
Max. Dauerstrom des Motors
I
81 mA
P-111
Nennspannung des Motors
U
12 V
P-112
Phasenwiderstand des Motors
R
114 Ohm
P-113
Induktivität des Motors
L
0.92 mH
P-114
Amplitude Gegen-EMK des Motors
U
1 mV/rpm
P-118
Max. zulässige Wicklungstemperatur des Motors
T
85 °C
P-119
Wärmewiderstand des Motors zwischen Wicklung und Gehäuse
Rth1
19.5 K/W
P-120
Wärmewiderstand des Motors zwischen Gehäuse und Umgebungsluft
Rth2
45.5 K/W
P-121
Thermische Zeitkonstante der Motorwicklung
τw1
3160 ms
P-122
Thermische Zeitkonstante des Motorgehäuses
τw2
108000 ms
Encoderdaten
P-201
Impulse pro Umdrehung des Encoders
256
P-202
Kanäle des Encoders
A, A-, B, B-
P-203
Frequenzbereich des Encoders
f
320 kHz
P-204
Betriebsspannung des Encoders
U
5 ±0.2 V
P-206
Ausgangsstrom des Encoders
I
5 mA
P-207
Signal/Phasenverschiebung des Encoders
90±45 °
Daten Endlagenschalter
P-302
Konfiguration Endlagenschalter
n.c.
Spindeldaten: Präzisionsspindel m 2x0.4 – 12mm Verstellweg
P-402
Steigung
R
0.4 mm
Material Informationen
P-900
RoHS-konform
ja
P-901
Schmierstoff Getriebeabtriebslagerung
Longtime PD2
P-903
Schmierstoff Getriebeeinbausatz
Molykote BR 2 plus
P-905
Schmierstoff bei Spindel-Mutter-System
Fomblin GRM60
P-908
Material Getriebeeinbausatz
NiFe
P-909
Material Getriebeabtriebslagerung
1.4108 DIN EN
P-911
Material Motorlagerung
Stainless steel
P-912
Material abtriebsseitiges Getriebegehäuse
1.4305 DIN EN
P-914
Material Motorgehäuse
Steel, black coated
P-917
Material der Spindel
1.4305 DIN EN
Grafiken
P-019
Alternative Produkte